




施邁特步進驅動器的電流:
電流是判斷驅動器能力的大小,是選擇驅動器的重要指標之一,通常驅動器的最大電流要略大於(yu) 電機標稱電流,通常驅動器有2A、4A、5A、7A、10A等規格。
施邁特步進驅動器供電電壓:
供電電壓是判斷驅動器升速能力的標誌,常規電壓供給有:24VDC、40VDC、50VDC、80VDC、110VA、220VAC等。
施邁特步進驅動器的細分:
細分是控製精度的標誌,通過增大細分能改善精度。細分能增加電機平穩性,通常步進電機都有低頻振動的特點,通過加大細分可以改善,使電機運行非常平穩。
控製信號接口說明:
1、差分式接口:
施邁特電氣(SHIMET)步進驅動器采用差分式接口電路,內(nei) 置高速光電耦合器 ,允許接收長線驅動器,集電極開路和PNP輸出電路的信號,可適配各種控製器接口,抗幹擾能力強。
2、單/雙脈衝(chong) 模式:
施邁特(SHIMET)根據客戶需要生產(chan) 出數款驅動器可以接收兩(liang) 類脈衝(chong) 信號:一種為(wei) 脈衝(chong) +方向形式(單脈衝(chong) );一種為(wei) 正脈衝(chong) +反脈衝(chong) (雙脈衝(chong) )形式。可通過驅動器內(nei) 部的跳線器進行選擇。

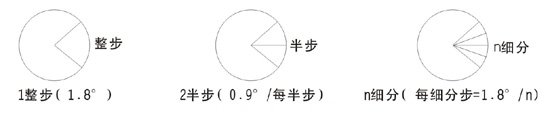
步進驅動器工作模式 :
有三種基本的步進電機驅動模式:整步、半步、細分。其主要區別在於(yu) 電機線圈電流的控製精度(即激磁方式)。
1、整步驅動:
在整步運行中,同一種步進電機既可配整/半步驅動器也可配細分驅動器,但運行效果不同。步進驅動器按脈衝(chong) /方向指令對兩(liang) 相步進電機的兩(liang) 個(ge) 線圈循環激磁(即將線圈充電設定電流),這種驅動方式的每個(ge) 脈衝(chong) 將使電機移動一個(ge) 基本步距角,即1.80度 (標準兩(liang) 相電機的一圈共有200個(ge) 步距角)。
2、半步驅動:
在單相激磁時,電機轉軸停至整步位置上,驅動器收到下一脈衝(chong) 後,如給另一相激磁且保持原來相繼處在激磁狀態,則電機轉軸將移動半個(ge) 步距角,停在相鄰兩(liang) 個(ge) 整步位置的中間。如此循環地對兩(liang) 相線圈進行單相然後雙相激磁步進電機將以每個(ge) 脈衝(chong) 0.90度的半步方式轉動。所有雷賽公司的整/半步驅動器都可以執行整步和半步驅動,由驅動器撥碼開關(guan) 的撥位進行選擇。和整步方式相比,半步方式具有精度高一倍和低速運行時振動較小的優(you) 點,所以實際使用整/半步驅動器時一般選用半步模式。
3、細分驅動:
細分驅動模式具有低速振動極小和定位精度高兩(liang) 大優(you) 點。對於(yu) 有時需要低速運行(即電機轉軸有時工作在60rpm以下)或定位精度要求小於(yu) 0.90度的步進應用中,細分驅動器獲得廣泛應用。其基本原理是對電機的兩(liang) 個(ge) 線圈分別按正弦和餘(yu) 弦形的台階進行精密電流控製,從(cong) 而使得一個(ge) 步距角的距離分成若幹個(ge) 細分步完成。如上圖所示。例如十六細分的驅動方式可使每圈200標準步的步進電機達到每圈200*16=3200步的運行精度(即0.1125°)。雷賽公司可提供規格齊全、性能優(you) 越、品質可靠、價(jia) 格優(you) 惠的十餘(yu) 款細分驅動器。
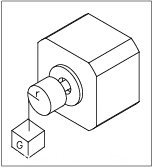
1. 負載分類:
(1)Tf力矩負載:
Tf = G·r
G 重物重量 r 半徑
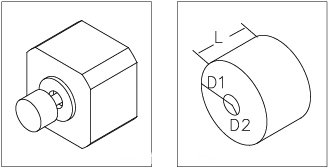
(2)TJ慣性負載:
J = M(R12+R22)/ 32 (Kg·cm)
M:質量
R1:外徑
R2:內(nei) 徑
TJ = J·dw/dt dw/dt 為(wei) 角加速度
2、力矩曲線圖的說明
力矩曲線圖是步進電機輸出特性的重要表現,以下是我們(men) 對其中關(guan) 鍵詞語的解釋。

說明: 當一個(ge) 係統的工作頻率點在力矩曲線圖的運行區域內(nei) 時,如何在最短的時間內(nei) 加速,減速就成了關(guan) 鍵。 (1)直線加速運動 已知電機負載為(wei) TL,要從(cong) F0 在最短時間tr內(nei) 加速到F1,求tr 和 加速脈頻率F(t) 已知電機負載為(wei) TL,要從(cong) F0 在最短時間tr內(nei) 加速到F1,求tr 和 加速脈頻率F(t)
(1). 工作頻率點: 表示步進電機在該點的轉速值。單位:Hz
n=Θ*Hz / (360*D)
n 轉/秒
Hz 該點的頻率值
D 電路的細分值,
Θ 步進電機的步距角
例:1.8步進電機,在1/2細分驅動的情況下(即每步0.9)500Hz 時,其速度是 1.25轉/秒
(2). 起動區域: 步進電機可以直接起動或停止的區域。
(3). 運行區域: 在這個(ge) 區域裏,電機不能直接運行,必須先要在起動區域 內(nei) 起動,然後通過加速的方式,才能到達該工作區域內(nei) 。同樣,在該區域內(nei) ,電機也不能直接製動,否則就會(hui) 造成失步,必須通過減速的方式到起動區域內(nei) ,在進行製動。
(4). 最大起動頻率點:步進電機在空載情況下,最大的直接起動速度點。
(5). 最大運行頻率點:步進電機在空載情況下,可以達到的最大的運行速度點。
(6). 起動力矩:步進電機在特定的工作頻率點下,直接起動可帶動的最大力矩負載值。
(7). 運行力矩:步進電機在特定的工作頻率點下,運行中可帶動的最大力矩負載值。由於(yu) 運動慣性的原因,所以,運行力矩要比起動力矩大。
3 、加速和減速運動的控製
如下圖示,步進電機的動態力矩特性一般在低速時為(wei) 水平直線狀,在高速時,由於(yu) 電感的影響,很快下滑。 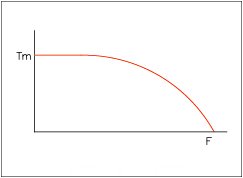
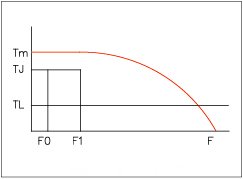
A.確定TJ,一般TJ =70% Tm。
B.tr = 1.8*10-5*J*Θ*(F1-F0)/ (TJ-TL)
C.F(t)=(F1-F0)*t/tr+F0 , 0 < t < tr 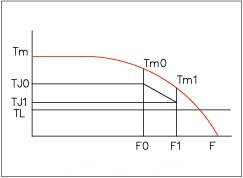
A.確定TJ0,TJ1一般TJ0 =70% Tm0,TJ1 =70% Tm1,TL=60%Tm1
B.tr = F4*ln[(TJ0-TL)/(TJ1-TL)]
C.F(t)=F2*[1-e^(-t/F4)]+F0 , 0 < t < tr
其中,F2=(TL-TJ0)*(F1-F0)/(TJ1-TJ0)
F4=1.8*10-5*J*Θ*F2 /( TJ0-TL)
J 為(wei) 電機轉子和負載的轉動慣量,Θ為(wei) 每一步的度數,整步運行時為(wei) 電機步距角。
至於(yu) 減速的控製,隻要將上訴的加速脈頻率反過來進行即可。
4 、振動和噪音
一般來說,步進電機在空載運行時,在200pps左右會(hui) 有一個(ge) 很嚴(yan) 重的振動,甚至會(hui) 產(chan) 生失步的現象,這是由於(yu) 電機轉子是一個(ge) 有質量的物體(ti) ,當電機運行的頻率接近到轉子的固有頻率,振動就產(chan) 生了,一般有幾種解決(jue) 的辦法:
(1). 避開振動區,使電機的工作頻率不在這個(ge) 範圍內(nei) 。 #p#分頁標題#e#
(2). 采用細分的驅動方式,使原來1步完成的動作分幾步完成,減少振動,一般半步運動時,電機的力矩比整步時少15%,采用正弦波電流控製時,力矩減小為(wei) 30%。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們