




隨著控製理論和電力電子以及永磁材料的發展,永磁推進電機被廣泛用於(yu) 各種變速驅動場合,這主要是因為(wei) 永磁推進電動機具有結構簡單、運行可靠、體(ti) 積小、重量輕以及具有較高的效率和功率因數等優(you) 點。
傳(chuan) 統的永磁同步電機調速係統一般采用雙閉環係統,外環的速度控製一般可以實現數字控製,而內(nei) 環的電流控製一般不容易實現數字控製,這主要是因為(wei) 電機的電氣時間常數比較小,對電流控製的實時性要求很高,一般的微處理器很難滿足要求。但是隨著電力電子技術和微處理器技術的發展,特別是TI公司針對電機控製而推出的DSP-F240為(wei) 實現全數字控製提供了比較現實的手段。DSP-F240主要由CPU、片內(nei) RAM和可編程FLASH ROM、事件管理器、片內(nei) 周邊接口等部分組成,它的工作頻率比較高,一般要大於(yu) 20MIPS,並且片上集成了很多麵向電機控製的外圍設備,使得整個(ge) 係統的實現相對比較容易。本文介紹以TMS320LF2407ADSP為(wei) 核心的永磁同步電機推進係統的硬件結構和軟件流程,並對該套方案進行了Matlab/Simulink仿真和低速運行實驗。
1 永磁同步電動機的矢量控製策略
矢量控製理論是由F.Blaschke於(yu) 1971年提出的,其基本原理是:在轉子磁鏈dqO旋轉坐標係中,將定子電流分解為(wei) 相互正交的兩(liang) 個(ge) 分量id和iq其中id與(yu) 磁鏈同方向,代表定子電流勵磁分量,iq與(yu) 磁鏈方向正交,代表定子電流轉矩分量,用這兩(liang) 個(ge) 電流分量所產(chan) 生的電樞反應磁場來等效代替原來定子三相繞組電流ia、ib、ic所產(chan) 生的電樞反應磁場,即進行Park變換:

式中:γ為(wei) 轉子位置角,即轉子d軸領先定子a相繞組中心線的電角度。然後分別對id和io進行獨立控製,即可獲得像直流電機一樣良好的動態特性。表麵凸出式轉子結構的永磁同步電機d、q軸電感基本相同,因而其電磁轉矩方程為(wei) :

式中:pn為(wei) 轉子極對數,Ψf為(wei) 永磁體(ti) 產(chan) 生基波磁鏈的有效值。
為(wei) 使定子單位電流產(chan) 生最大轉矩,提高電機的工作效率,本文選用最大轉矩/電流矢量控製,由式(2)可知,對於(yu) 表麵凸出式轉子結構的永磁同步電機,可令id=0,通過調節iq來實現轉矩的控製如圖1所示,整個(ge) 伺服係統由3個(ge) 控製環構成。
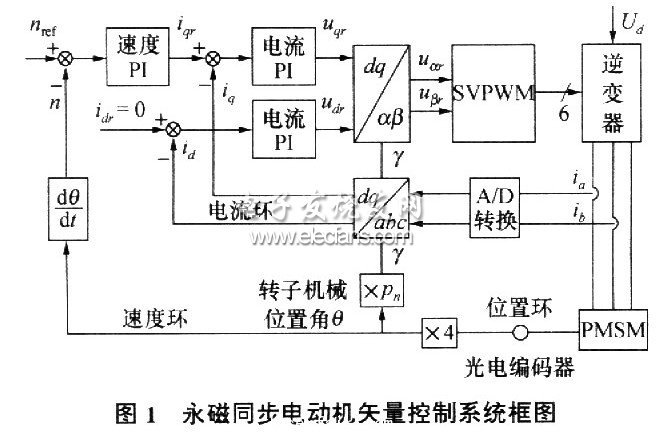
1)位置環:采集電機旋轉編碼器輸出的脈衝(chong) 信號,鑒相、倍頻後進行計算,提供坐標變換所需的轉子位置信息;
2)速度環:比較實際轉速n與(yu) 設定轉速nref所得差值經PI調節後作為(wei) q軸電流參考值iqr再經電流環調節後;
3)電流環:比較電流實際值id、iq與(yu) 參考值idr、iqr,經PI調節後產(chan) 生d、g軸電壓參考值udr、uqr,將其轉換至靜止坐標係中得uαr、uβr按SVPWM方式生成逆變器觸發信號,驅動電機。
2 係統硬件結構
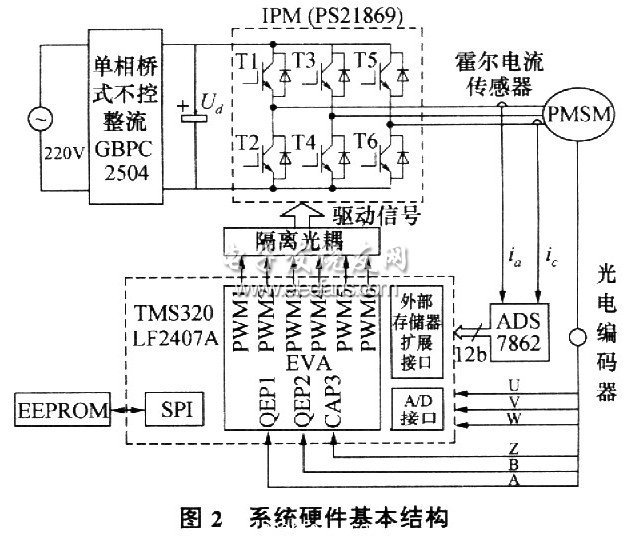
永磁同步電動機推進係統的硬件結構如圖2所示,它主要提供以下3大功能:電動機控製策略的實現、控製量的檢測采樣以及功率驅動。
2.1 TMS320LF2407A DSP
整個(ge) 係統控製策略的實現由TMS320LF2407A DSP完成,它具有低功耗和高速度的特點,其單指令周期最短可達25 ns片內(nei) 兩(liang) 個(ge) 事件管理器(EVA和EVB)各有2個(ge) 通用定時器,1個(ge) 外部硬件中斷引腳,3個(ge) 捕獲單元(CAP)和1個(ge) 正交編碼單元(QEP)這些功能與(yu) 串行外設接口(SPI)等模塊一起,這就方便了電機控製過程中的數據處理、策略執行及決(jue) 策輸出等。
2.2 控製量檢測部分
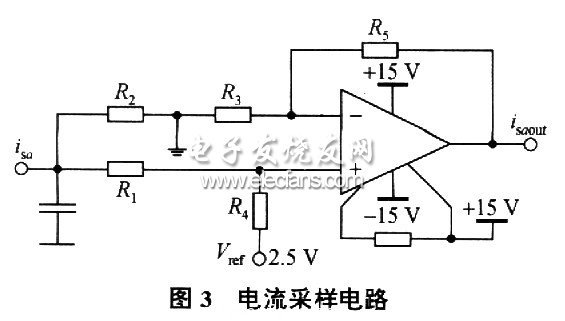
電機機械量的采集由增量式光電編碼器來完成,其輸出包括兩(liang) 組脈衝(chong) 信號:A、B、Z和U、V、W,它們(men) 與(yu) DSP的連接如圖3所示其中A、B信號正交,正交編碼單元將它們(men) 四倍頻後送入相應的計數器進行計數,計數方向由A、B信號的相位先後決(jue) 定Z信號隨轉子每轉一周輸出一個(ge) 脈衝(chong) ,根據它們(men) 的不同狀態,可將360°電角度平麵分成6個(ge) 部分,用以確定電機的初始轉子位置角。
電機電流狀態量的采集由霍爾電流傳(chuan) 感器完成,其采樣電路如圖3所示,輸入輸出關(guan) 係為(wei) :

為(wei) 了保證電流較小時的采樣精度,改善電機低速、輕載下的運行情況,這裏采用12 b雙A/D轉換器ADS7862來代替DSP內(nei) 部10 b的模/數轉換模塊,通過DSP的外部存儲(chu) 器擴展接口,將式(3)的模擬電流量轉換為(wei) 數字量結果,輸入DSP。
2.3 功率驅動部分
永磁同步電機的功率驅動為(wei) 交-直-交PWM方式,其中整流部分采用單相橋式不控整流,逆變部分采用智能功率模塊PS21869,它內(nei) 部集成了6個(ge) 絕緣柵雙極型晶體(ti) 管及其驅動、保護電路,由DSP的PWMl~6引腳提供觸發信號,能夠在過流或欠壓故障發生時,關(guan) 閉IGBT驅動電路,同時在相應故障引腳輸出故障信號至DSP的PDPINTA引腳,通過硬件中斷,封鎖PWM脈衝(chong) 輸出。
3 係統軟件設計
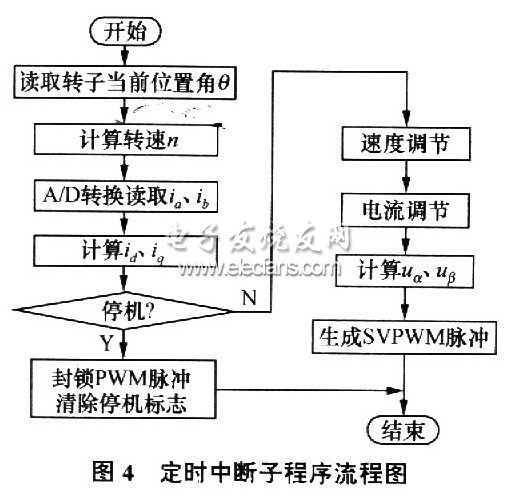
永磁電機推進係統的軟件主要由3部分組成:初始化程序、主程序和中斷服務子程序係統複位時,先執行初始化程序,檢測、設定DSP內(nei) 部各模塊的工作模式和初始狀態主程序負責收集電機電流、轉速等一係列實時運行信息;定時中斷子程序則是實現電機矢量控製策略的核心程序,主要完成PI調節和SVPWM波形發生這兩(liang) 大功能,其流程圖如圖4所示。
3.1 數字PI調節器
模擬PI調節器的控製規律為(wei) :

其中:e(t)為(wei) 參考值與(yu) 實際值之差,作為(wei) PI調節器的輸入;u(t)為(wei) 輸出和被控對象的輸入;uo為(wei) PI調節器的初值;Kp為(wei) 比例係數;TI為(wei) 積分常數。#p#分頁標題#e#
將式(4)離散化,即可得到數字PI調節器的數學表達式:

式中:k為(wei) 采樣序號,T為(wei) PWM采樣周期,KI=Kp/TI,為(wei) 積分係數。
由於(yu) 電機轉軸和負載軸轉動慣量的存在,速度PI調節器的時間常數較大,調速時係統響應較慢而電流PI調節器則因為(wei) 電時間常數較小,在電機起動和大範圍加減速時能夠快速進行電流調節和限幅,增強了係統抗電源和負載擾動的能力。
3.2 SVPWM波形發生
SVPWM是一種從(cong) 磁通角度出發的PWM方式,其基本原理及扇區劃分見文利用EVA的全比較單元,可直接在PWMl~6引腳上輸出五段式SVPWM波形,它在每個(ge) PWM周期中,能夠保證一相的開關(guan) 狀態不變,有利於(yu) 開關(guan) 損耗的減小其主要步驟如下:
1)將比較控製寄存器(COMCONA)第12位置l,使SVPWM發生功能有效;
2)設置比較方式控製寄存器(ACTRA),令SVPWM輸出矢量正向旋轉,使PWMl、3、5引腳高有效,PWM2、4、6引腳低有效;
3)設置定時器TI計數方式為(wei) "連續增/減",相應周期寄存器TIPR的初始值為(wei) PWM采樣周期的一半,即Tc/2;
4)計算輸出空間電壓矢量Uout在兩(liang) 相靜止坐標係中的分量uα、iβ;
5)確定組成Uout所在扇區的兩(liang) 個(ge) 非零空間矢量Ur、Ux+60按其值裝配ACTRA;
6)根據表1計算Ux、Ux+60的作用時間t1、t2,將t1裝入比較寄存器CMPRlt1+t2裝入CMPR2,啟動定時器操作。
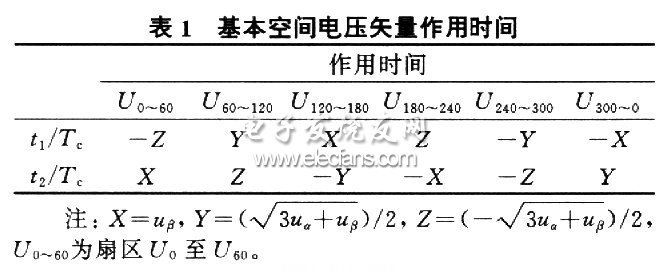
當TI值與(yu) CMPRl或CMPR2值發生匹配時,PWM輸出就會(hui) 產(chan) 生跳變通過及時更新每個(ge) 采樣周期中CMPRl、CMPR2的值,就可以形成一係列不等寬的脈衝(chong) ,使輸出電壓矢量的磁鏈軌跡為(wei) 圓形,為(wei) 避免IPM同一橋臂上下兩(liang) 隻IGBT的直通,程序通過死區控製寄存器對PWMl~6引腳設置死區時間;同時濾除PWM序列中的過窄脈衝(chong) ,以減小器件的開關(guan) 損耗。
4 仿真與(yu) 實驗結果
本文利用Matlab/Simulink工具箱,根據圖1搭建係統模型,對一台3對極永磁同步電機進行了矢量控製策略的仿真,所得仿真波形如圖5所示。
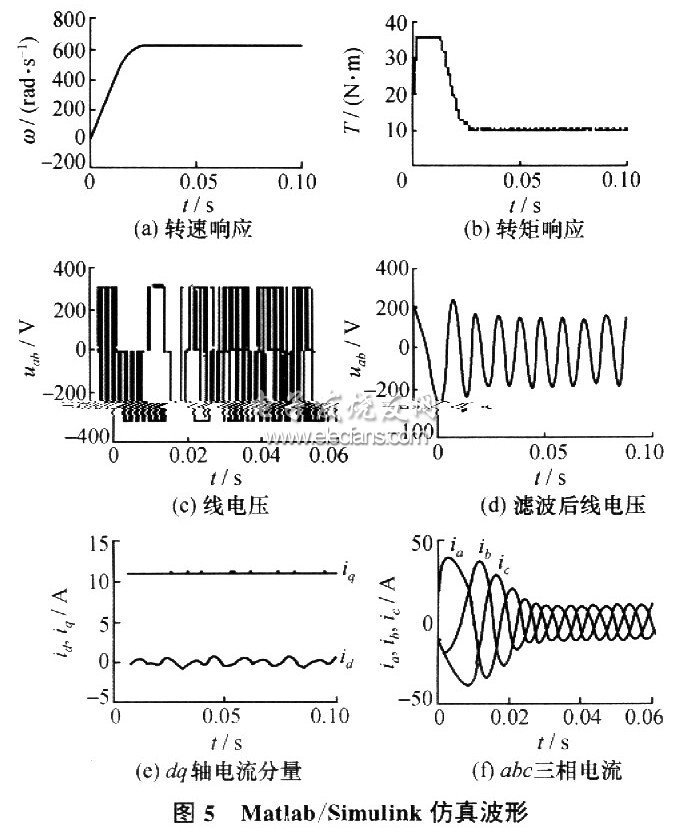
從(cong) 仿真結果可以看出,本矢量控製係統響應快速,轉矩脈動小,動態性能良好;id能夠較好地跟隨參考值0,從(cong) 而保證了單位電流下最大轉矩的輸出,有利於(yu) 推進電機效率的提高。
實際實驗中,TMS320LF2407A時鍾頻率為(wei) 30 MHz,SVPWM采樣頻率為(wei) 3 kHz,死區時間設為(wei) 8 μs,並濾除正負脈寬小於(yu) 6%脈衝(chong) 周期的過窄脈衝(chong) 當轉速為(wei) 300 r/min時,可得永磁電機推進係統輸出電壓、電流波形及其頻譜如圖6、圖7所示。
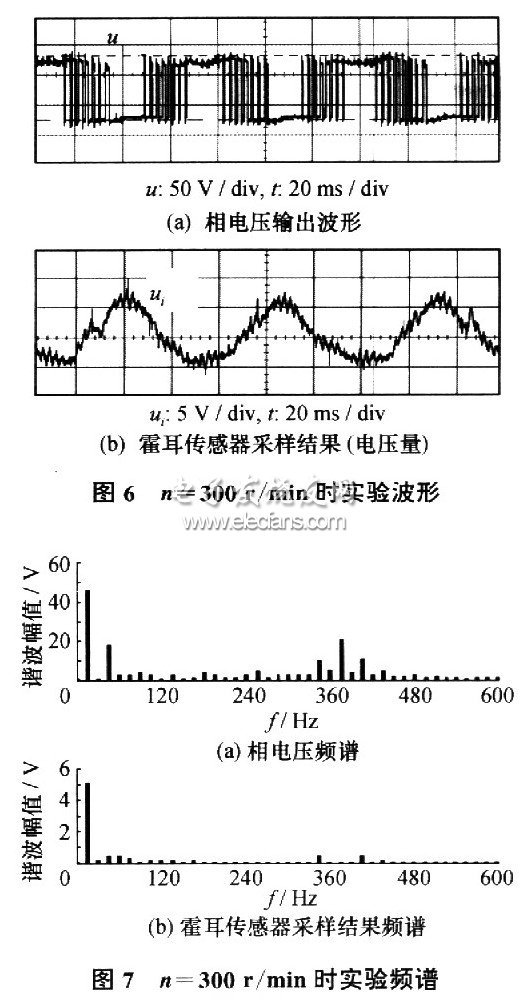
由圖7a可看出,SVPWM方式生成的電壓基波幅值較大,諧波分布比較分散,其低次諧波主要為(wei) 三次諧波;由圖7b可以看出,三相電機的電路結構對三次諧波成分有自然抑製作用,高次諧波則通過電機繞組電感的濾波作用得到削弱和消除,從(cong) 而大大減小了諧波電流。
5 結 論
仿真與(yu) 實驗結果表明,采用交-直-交PWM驅動和最大轉矩/電流矢量控製的全數字永磁同步電動機推進係統,電壓利用率較高,轉矩脈動小,能夠較好地抑製了電機電流中的諧波,低速性能優(you) 於(yu) 直接轉矩控製,滿足推進電動機低轉速、大轉矩、輕噪聲的要求,為(wei) 現代艦船電力推進係統數字化操控的實現提供了一定參考。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們