




步進電機是將電脈衝(chong) 信號轉變為(wei) 角位移或線位移的開環控製元步進電機件。在非超載的情況下,電機的轉速、停止的位置隻取決(jue) 於(yu) 脈衝(chong) 信號的頻率和脈衝(chong) 數,而不受負載變化的影響,當步進驅動器接收到一個(ge) 脈衝(chong) 信號,它就驅動步進電機按設定的方向轉動一個(ge) 固定的角度,稱為(wei) “步距角”,它的旋轉是以固定的角度一步一步運行的。可以通過控製脈衝(chong) 個(ge) 數來控製角位移量,從(cong) 而達到準確定位的目的;同時可以通過控製脈衝(chong) 頻率來控製電機轉動的速度和加速度,從(cong) 而達到調速的目的。

1 步進電機特點及驅動
步進電機受脈衝(chong) 電流控製,每輸入一個(ge) 脈衝(chong) 電機轉軸步進一個(ge) 步距角增量。轉子的角位移正比於(yu) 輸入脈衝(chong) 的數量,轉子的角速度正比於(yu) 輸入脈衝(chong) 的頻率,轉子的旋轉方向取決(jue) 於(yu) 定子繞組的通電順序。在使用過程中步進電機有一定的步距誤差,但沒有累計誤差。若維持控製繞組的電流不變,則步進電機就可停在某一位置不動。其按力矩產(chan) 生的原理可分為(wei) 反應式步進電機和激磁式步進電機。按輸出力矩大小可分為(wei) 伺服式步進電機和功率式步進電機。
由於(yu) 步進電機是屬於(yu) 感性器件,感抗與(yu) 其輸入頻率是成正比。假設步進電機的轉速增加,其感抗也會(hui) 增大。該狀態下流入電機線圈的電流就會(hui) 減小,電機的輸出扭力達不到要求輸出,嚴(yan) 重的情況下會(hui) 造成電機失步或者電機隻振動不轉。這就要求其驅動電路能夠提供穩定的輸出電流,使步進電機具有穩定的轉動。一般設計中步進電機驅動都用采用三極管或者是用ULN2803IC等來驅動,這些驅動在實驗板或一些轉速不高、帶動負載小的應用場所使用比較合適,在實際工作設計中遠遠達不到所需要求。針對這些問題,各大公司陸續推出了專(zhuan) 用的步進電機驅動芯片,簡化其驅動設計。Allegro公司的SMA7029M多芯片模塊就是一款性能使用簡單控製優(you) 良的步進電機控製模塊,該多芯片模塊能為(wei) 步進電機提供穩定的輸出電流,使電機能夠穩定的轉動。
2 步進電機工作原理
通常電機的轉子為(wei) 永磁體(ti) ,當電流流過定子繞組時,定子繞組產(chan) 生一矢量磁場。該磁場會(hui) 帶動轉子旋轉一角度,使得轉子的一對磁場方向與(yu) 定子的磁場方向一致。當定子的矢量磁場旋轉一個(ge) 角度。轉子也隨著該磁場轉一個(ge) 角度。每輸入一個(ge) 電脈衝(chong) ,電動機轉動一個(ge) 角度前進一步。它輸出的角位移與(yu) 輸入的脈衝(chong) 數成正比、轉速與(yu) 脈衝(chong) 頻率成正比。改變繞組通電的順序,電機就會(hui) 反轉。所以可用控製脈衝(chong) 數量、頻率及電動機各相繞組的通電順序來控製步進電機的轉動。
步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控製電流,用這種電流為(wei) 步進電機供電,步進電機才能正常工作,驅動器就是為(wei) 步進電機分時供電的,多相時序控製器
雖然步進電機已被廣泛地應用,但步進電機並不能象普通的直流電機,交流電機在常規下使用。它必須由雙環形脈衝(chong) 信號、功率驅動電路等組成控製係統方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專(zhuan) 業(ye) 知識。
步進電機作為(wei) 執行元件,是機電一體(ti) 化的關(guan) 鍵產(chan) 品之一, 廣泛應用在各種自動化控製係統中。隨著微電子和計算機技術的發展,步進電機的需求量與(yu) 日俱增,在各個(ge) 國民經濟領域都有應用。
3 步進電機驅動設計
SMA7029M是專(zhuan) 為(wei) 高效率、高性能的兩(liang) 相單極步進電機設計的多芯片模塊,它采用功率FET技術和單片邏輯控製電路對完成步進電機的運動控製。同一係列的還有SLA7024M和SLA7026M,三個(ge) 芯片模塊不同主要是在輸出額定電流(1.5 A或3.0 A)和包裝樣式上。
3.1 SMA7029M結構及驅動設計
SMA7029M內(nei) 部主要包含電流峰值檢測部分,PWM關(guan) 閉時間控製部分,電機邏輯控製部分,輸出電流及回流電流控製部分,如圖1所示。其工作過程主要是通過電流采樣,通過峰值檢測電路得到當前最大電流,根據其結果控製PWM工作時間,最終達到控製整個(ge) 芯片組輸出電流的目的。
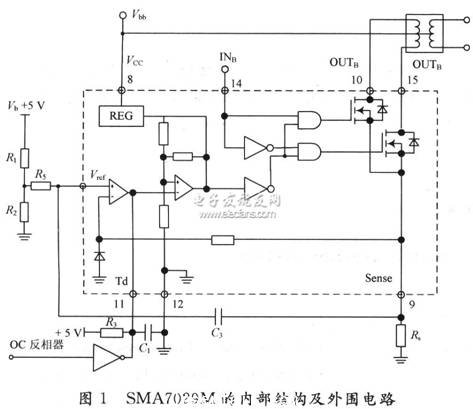
圖1也給出基於(yu) SMA7029M芯片組電機驅動設計的外圍電路,主要包含參考電壓取樣電路,OC門反向器輸入電路,電流取樣以及輸出變壓器耦合電路。通過設置電路中的R3=47 kΩ,C1=470 pF,可以得到脈寬約等於(yu) 12μs。
3. 2 邏輯控製關(guan) 係
SMA7029M可以通過外部邏輯控製實現電機狀態的改變,表1給出了詳細的控製方式及輸出結果。
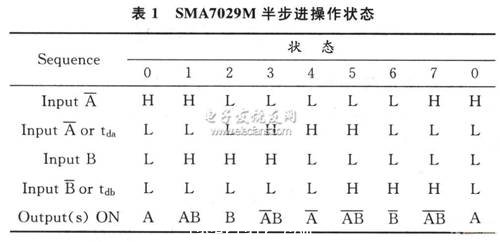
其中tda和tdb紮連接外部OC門反相器的邏輯控製信號,連接關(guan) 係見圖1所示。從(cong) 表l中可以看出,不同控製關(guan) 係下輸出的不同狀態轉移,A和B兩(liang) 個(ge) 通道可以獨立控製,例如在狀態0及狀態2下A,B通道分別獨立工作,而在狀態1下二者可以同時工作。
3.3 工作模式選擇
通過改變圖1中外部元器件取值來設置PWM電流啟動點。Vb是供電電壓,典型取值為(wei) 5 V;R1,R2為(wei) 分壓電阻,為(wei) 所需參考電壓提供合適的輸入;Rs是電流取樣電阻。其中參考電壓Vref輸入最大不能超過2 V,相應地選擇合適的電阻。在正常PWM模式(滿電流工作)下,Iout需要設置到電機工作所需的滿電流,它由式(1)決(jue) 定:

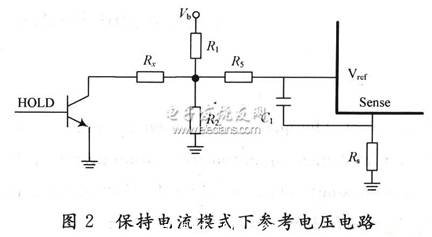
為(wei) 了使輸出電流可調,可以將圖1中的固定電阻Rz改用可調電位器。在保持電流模式下,圖2增加電路可以減小步進電機的電壓。
其中外部三極管可以改變分壓比,使參考電壓Vref發生變化,從(cong) 而減小輸出電流。此時的Ihold由電阻R1,R2,Rx,Rs以及電壓Vb共同決(jue) 定:
![]()
4 結 語
步進電機驅動作為(wei) 現代機電一體(ti) 化產(chan) 品中的關(guan) 鍵部件之一,在當今社會(hui) 中發揮的作用越來越重要,從(cong) 數控機床、包裝機械到電腦的外圍裝置、機器人係統、儀(yi) 表儀(yi) 器等各種信息工業(ye) 產(chan) 品中,都離不開步進電機,進而也對其驅動電路設計提出了進一步的要求。通過在包裝機控製係統中的實際使用,進一步證明了該步進電機驅動器工作可靠,效率高,矩頻特性好,可以廣泛應用於(yu) 小型機電一體(ti) 化設備中。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們