




摘要:該文以最常用的關(guan) 節型六自由度焊接機器人為(wei) 例,概述了控製係統的結構組成,強調闡明焊接係統與(yu) 焊接參量與(yu) 通用關(guan) 節型機器人的實用計算機接口,並對現代焊接機器人的人機界麵做了綜合性的簡介。
關(guan) 鍵詞:關(guan) 節型通用機器人;運動自由度;焊接係統接口;離線與(yu) 在線編程;3D動畫示教與(yu) 編程
作為(wei) 焊接機器人的用戶,為(wei) 正確選擇、合理使用並做到能常規維護焊接機器人,必須對焊接機器人的運動控製係統有一定層次的了解。
焊接機器人是裝上了焊鉗或各種焊槍的工業(ye) 機器人。工業(ye) 機器人的運動控製係統涉及數學、自動控製理論等,內(nei) 容很多。要在較短的篇幅中,全麵而係統地介紹工業(ye) 機器人的運動控製係統,實在是非工業(ye) 機器人控製專(zhuan) 業(ye) 人員所能及的事情,因此,本章內(nei) 容是從(cong) 焊接機器人的用戶角度出發,盡量以圖代解、簡明地闡述有關(guan) 機器人運動控製係統(見圖1)的一般性問題。

1 焊接機器人運動軸的構成
1.1 焊接機器人運動軸的定義(yi)
點焊與(yu) 弧焊兩(liang) 種機器人都是由典型6關(guan) 節型(也稱6軸)工業(ye) 機器人裝上焊鉗或焊槍而構成,因此,討論焊接機器人運動係統構成,亦即討論典型6關(guan) 節工業(ye) 機器人的運動係統構成。顧名思義(yi) ,典型6關(guan) 節工業(ye) 機器人有6個(ge) 可活動的關(guan) 節,每個(ge) 關(guan) 節的運動名稱都有定義(yi) ,在圖2中,給出了典型6關(guan) 節工業(ye) 機器人各關(guan) 節的編號與(yu) 動作狀態(編號後麵的英文大寫(xie) 字母就是規定動作英文名稱的第一個(ge) 字母),每個(ge) 關(guan) 節的運動都由一個(ge) 伺服電(動)機驅動,每個(ge) 電機都有各自的伺服控製係統。機器人最後“手”關(guan) 節上所安裝的工具中心點(TCP)(對點焊鉗與(yu) 電焊槍的TCP點,在相應的機器人結構中都作了規定)的運動軌跡是多個(ge) 關(guan) 節伺服係統協同動作的結果。而機器人運動控製係統( 器)的作用就是如何根據編程指令來指揮控製6個(ge) 伺服電(動)機協同動作,以完成工具中心點所要求實現的運動軌跡。

圖2 新開發的帶內(nei) 置回轉擺動軸的FlexTorch機器人焊槍係統
1.2 焊接機器人的運動軸參數
焊接機器人的運動軸參數主要包括:各軸最大運動範圍、最大速度、相關(guan) 軸的容許轉距、相關(guan) 軸的容許慣性力矩等。一種典型的6關(guan) 節型工業(ye) 機器人的關(guan) 節運動參數的量值見表。
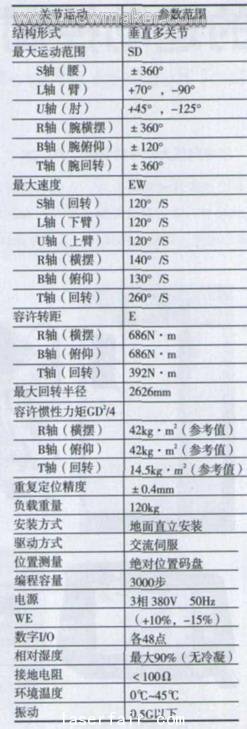
可以看出:6關(guan) 節型工業(ye) 機器人的運動軸參數不僅(jin) 涉及各軸本身,也最終決(jue) 定整台工業(ye) 機器人的性能。其中,最重要的性能指標是:重複定位精度和負載重量。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們