




1 引言
本文針對PID控製的特點,設計了一種積分分離的控製方法,即當係統誤差較大時,取消積分環節,避免由於(yu) 積分累積引起係統較大的超調;當係統誤差較小時,引入積分環節,以消除誤差,提高控製精度。將這種積分分離PID控製應用於(yu) 交流伺服係統的位置實時控製,從(cong) 而使控製過程的靜態、動態性能指標較為(wei) 理想。
2 係統結構設計
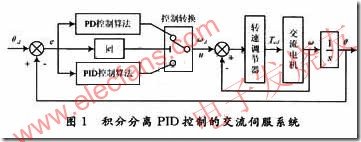
積分分離PID控製交流伺服係統結構如圖1所示。圖中θd為(wei) 給定角位移,θ為(wei) 電機轉軸的實際角位移,e為(wei) θd和θ進行比較而得到的偏差,則有:
圖1中,u為(wei) PID控製的轉速期望值;ωd為(wei) 期望電機轉速;ω為(wei) 實際電機轉速;ωd與(yu) ω的偏差經過轉速調節器產(chan) 生期望的電機電磁轉矩Td由於(yu) 內(nei) 環的不足可由外環控製來彌補,所以轉速調節器采用一般的PI調節器即可,而電機的電磁轉矩控製則采用直接轉矩控製方法。
3 積分分離PID控製器
PID控製是一種技術成熟、應用廣泛的控製方法,其結構簡單,而且對大多數過程均有較好的控製效果。其離散PID控製規律為(wei) :
式中,u(k)為(wei) k時刻控製器的輸出量;KP,KI,KD分別為(wei) 比例係數,積分係數和微分係數;e(K)為(wei) 當前時刻的交流伺服係統的位置與(yu) 期望值之差;e(k-1)為(wei) 上次采樣時刻的交流伺服係統的位置與(yu) 期望值之差。
由式(2)可得到控製器輸出第k個(ge) 周期時刻的控製量u(k)和第k-1個(ge) 周期時刻的控製量u(k-1)之間的增量為(wei) :

在PID控製中,積分環節的作用是消除靜態誤差,提高係統的控製精度。如果在誤差較大的初始階段引入積分環節,會(hui) 造成:PID的積分累積,從(cong) 而引起係統較大的超調。因此,本文針對PID控製的特點,設計了一種積分分離的控製方法,積分分離PID控製算法的程序框圖如圖2所示。
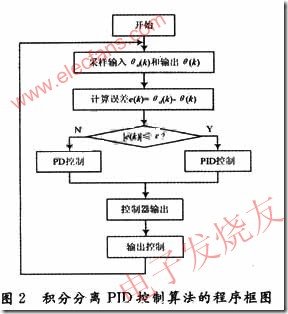
當係統誤差較大時,取消積分環節,采用PD控製,避免由於(yu) 積分累積引起係統較大的超調;當係統誤差較小時,引入積分環節,采用PID控製,以消除誤差,提高控製精度。即:
式中,ε>0為(wei) 人為(wei) 設定的閾值。
積分分離控製算法可表示為(wei) :

式中,T為(wei) 采樣時間,a為(wei) 積分項的開關(guan) 係數,即:

4 實驗研究
用於(yu) 實驗的交流電機參數為(wei) Pn=2.2 kW,Un=220 V,In=5 A,nn=1 440 r/min,r1=2.91 Ω,r2=3.04 Ω,Is=0.456 94 H,Ir=0.456 94 H,Im=O.444 27 H,Ten=14 N 。
通過實驗表明,積分分離PID控製充分發揮了PID控製調節精度高的優(you) 點,提高了係統的控製精度。
5 結語
本文提出了一種基於(yu) 積分分離PID控製的交流伺服係統,在係統誤差較大時,取消積分環節;當誤差較小時,引入積分環節,從(cong) 而使係統的靜態和動態性能指標較為(wei) 理想。這種控製方法提高了係統的精度。仿真實驗結果表明,該控製器具有很好的動靜態性能,是一種行之有效的控製器。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們