




作者:Thomas Hafner
汽車微控製器軟件營銷經理
Günter A. Hank
32位汽車微控製器產(chan) 品營銷經理
英飛淩科技
長期以來,諸如永磁同步電機(PMSM)和感應電機等三相交流電機,被廣泛地應用於(yu) 工業(ye) 控製係統。在汽車應用領域,這些電機還是相對時新的裝置,目前正被逐漸用作傳(chuan) 統內(nei) 燃機的補充品或替代品。PMSM采用的繞組為(wei) 三相正弦分布繞組和機械位移繞組。三相正弦波和時間位移電流可以產(chan) 生旋轉磁場。這一旋轉磁場使電機轉動,通過(逆變器中的)MOSFET切換電機繞組的電流而產(chan) 生。磁場定向控製(FOC)算法為(wei) 電機電流控製生成PWM模式。轉子的位置和電流持續不斷地被檢測。基於(yu) 高性能微控製器的高效FOC係統,為(wei) 電動汽車和混合動力汽車驅動提供安全高效的解決(jue) 方案創造了條件(圖1)。
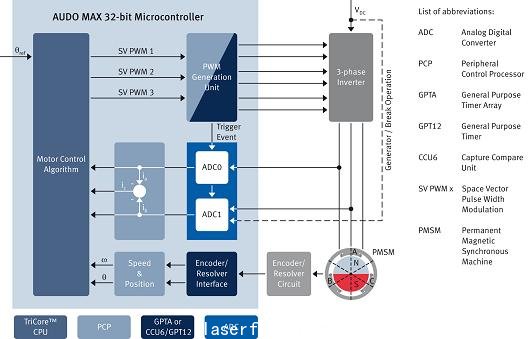
圖1:運行於(yu) FOC模式的32位TriCore微控製器。
AUDO MAX產(chan) 品係列的PWM生成方式
英飛淩的32位AUDO MAX係列微控製器內(nei) 裝一枚主內(nei) 核(TriCore CPU,淺綠色)和一枚快速協處理器(被稱為(wei) PCP,深綠色)。這種非對稱架構能夠利用PCP高效處理外圍設備,而無需中斷在TriCore CPU上運行主算法的處理進程。PCP負責處理關(guan) 鍵的實時中斷負荷,因此可減輕CPU的負擔。
有兩(liang) 種方案可以生成驅動逆變器的PWM。GPTA可生成非常複雜的PWM模式,例如非對稱死區時間生成或定製模式。外設模塊CCU6是一個(ge) 低端方案,可用於(yu) 生成中心對齊和邊緣對齊的PWM模式。相比GPTA而言,CCU6可以以較低的軟件開銷直接支持PWM信號生成,同時,無需配置多個(ge) 定時器單元。
CCU6和GPTA這兩(liang) 個(ge) 模塊都具備觸發功能,能夠讓PWM信號和A/D電流測量實現無延遲的等時同步(參見箭頭“觸發事件”)。作為(wei) 一個(ge) 附加的安全特性,每個(ge) GPTA模塊都配有“緊急模式停止信號”,可用於(yu) 設置安全開關(guan) 。針對TriCore AUDO MAX微控製器係列的所有成員,提供了一個(ge) 基於(yu) PRO-SIL的安全平台,它包含硬件(安全看門狗CIC61508)和軟件(SafeTcore驅動程序),可滿足ASIL認證的B級至D級要求。
通過模數轉換器(ADC)測量電流
圖1所給示例對電機的兩(liang) 個(ge) 相電流進行了測量,並采用了一個(ge) 模數轉換器對其進行轉換。基於(yu) 逐次逼近寄存器(SAR),該模數轉換器具備很高的精度(12位分辨率),並且轉換時間小於(yu) 1微秒。由兩(liang) 個(ge) 已知的相電流可以計算出第三個(ge) 相電流。針對更高的安全要求,建議對電機的第三個(ge) 相電流進行額外的測量。針對這一應用,帶有第三個(ge) 模數轉換模塊的微控製器可供選擇。
連接旋轉變壓器和編碼器
旋轉變壓器將PMSM轉子的角位移轉換為(wei) 一個(ge) 電氣值。一般情況下,可利用一個(ge) 附加的正切函數電路從(cong) 兩(liang) 個(ge) 信號(正弦/餘(yu) 弦)導出轉子的角度值。旋轉變壓器電路的信號輸出至SPI總線,也可由微控製器直接讀取旋轉變壓器的正弦和餘(yu) 弦信號。還有一種可選的方式是讀取編碼器信號,在運行於(yu) 微控製器GPT12的編碼器接口中對其進行調理,再反饋到控製算法。
AUTOSAR之外重複利用汽車電子軟件
近年來,汽車電子軟件和通信已通過OSEK、AUTOSAR、FlexRay等規範而標準化。除標準化軟件成分以外,汽車電子係統還使用了可在多種應用中被重複利用的控製算法。如今,電機控製由分布在汽車車身、底盤和動力總成係統各處的電子控製單元(ECU)來完成。
MC-ISAR eMotor驅動程序提取了三相電機應用中電流控製的一般特性,設計用於(yu) 支持多種位置信息采集模式和逆變器控製裝置。
三相電機控製
英飛淩AUDO MAX係列非常適用於(yu) 電機的控製。TriCore架構和MC-ISAR eMotor驅動程序可采用高級控製策略控製多台三相電機,包括無刷直流電機(BLDC)塊交換(block commutation,BC)及永磁同步電機(PMSM)磁場定向控製(FOC)。
單一微控製器甚至還能同時支持BLDC和PMSM電機控製。相比於(yu) 其他類型的電機而言,采用FOC控製的PMSM電機能效更高、磨損更小,並且可以實現精確控製和定位。特別是,這種電機支持線性轉矩控製,為(wei) 將其用於(yu) 混合電動汽車動力總成係統奠定了基礎。
圖2顯示了MC-ISAR eMotor驅動程序的電流控製環路,右側(ce) 為(wei) 複雜設備驅動(CDD)。這個(ge) 時間關(guan) 鍵型電流控製環路在中斷上下文中進行處理,處理時間不超過50微秒。左側(ce) 是附加的用於(yu) 位置和轉速控製的軟件成分(SWC),由應用程序提供。
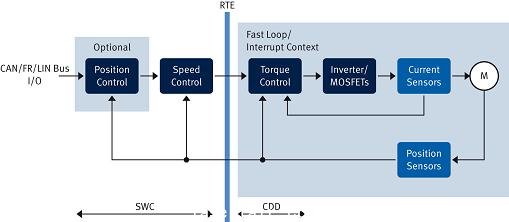
圖2:電機控製中的電流控製環。
位置檢測和電流檢測模式
為(wei) 符合精確定位的要求,MC-ISAR eMotor通過采用霍爾傳(chuan) 感器外加增量編碼器和旋轉變壓器,實現了典型高分辨率檢測模式。此外,還可將無傳(chuan) 感器FOC用於(yu) 故障安全模式。對於(yu) 成本敏感的應用,AUDO MAX係列支持直接旋轉變壓器模式,該模式通過軟件和分立元器件實現,避免了配備外置旋轉變壓器IC的需要,這能使每個(ge) 控製單元在成本上降低2美元左右。與(yu) 此同時,MC-ISAR eMotor可以支持兩(liang) 相或直流母線電流測量模式(圖3)。
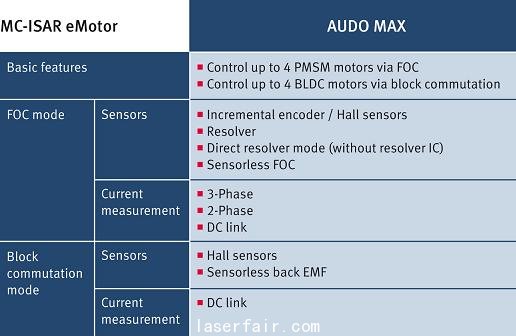
圖3:MC-ISAR eMotor操作模式。
MC-ISAR eMotor軟件劃分
此軟件可劃分為(wei) 兩(liang) 個(ge) 組成部分:不依賴於(yu) 硬件和依賴於(yu) 硬件的成分。不依賴於(yu) 硬件的模塊用於(yu) EmoControl、位置信息采集PA和FOC(圖4)。因此,EmoControl是通過FOC控製方向和電流的主要模塊。送入電機的電流決(jue) 定了轉矩。MC-ISAR eMotor驅動向應用程序反饋電機位置和轉速信息。位置信息采集PA模塊負責從(cong) 旋轉變壓器和編碼器信號中提取角度信息。具備Park-Clarke變換和空間矢量調製(SVM)的FOC,是通過檢測給定電流和位置來設置新電流的主要部分。
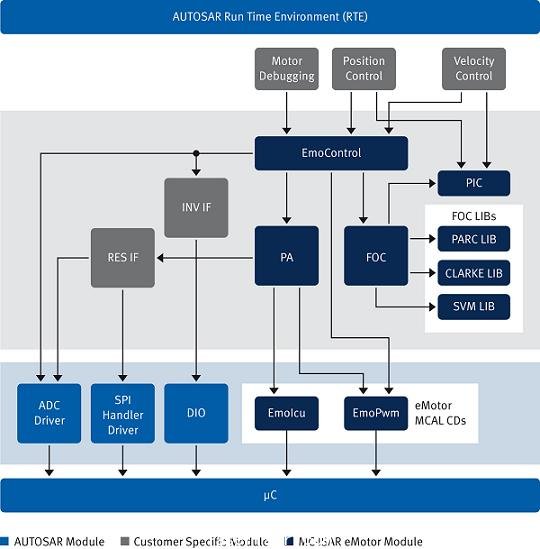
圖4:磁場定向控製(FOC)模塊框圖。
硬件相關(guan) 的模塊,包括重複使用的AUTOSAR MCAL驅動(ADC、SPI、DIO),或PWM信號生成(EmoPwm驅動CCU6)和編碼器接口EmoIcu(通過GPT12讀取編碼信號)的專(zhuan) 用模塊。客戶編寫(xie) 的位置和轉速控製代碼,可以按標準軟件成分(SW-C)添加,就像AUTOSAR所提供的一樣。
MC-ISAR eMotor安全考慮
為(wei) 支持符合安全要求的應用,從(cong) 一開始設計軟件成分時就考慮安全要求非常重要。在ECU的開發階段應明確應用的特定需求,並且,這些需求將隨應用的不同而不同。此外,為(wei) 支持安全應用,還應考慮現成電機驅動的某些安全因素。MC-ISAR eMotor采用符合ISO26262的軟件開發流程開發而成,並可支持安全相關(guan) 係統中的三相電流測量。
英飛淩eMotor主要優(you) 勢概述
英飛淩AUDO MAX係列和MC-ISAR eMotor驅動,可並行控製多達4台PMSM或BLDC電機,同時還能滿足應用任務控製所需的性能。MC-ISAR eMotor和標準AUTOSAR MCAL驅動由同一配置工具整合,因此,用戶可在同一界麵中為(wei) AUTOSAR MCAL和MC-ISAR eMotor驅動配置微控製器資源,為(wei) 無縫配置不同軟件模塊創造了條件。汽車ECU開發人員可專(zhuan) 注於(yu) 電機的應用相關(guan) 控製,而無需改編電機的控製算法。為(wei) 降低係統成本,AUDO MAX係列還支持直接旋轉變壓器模式,免除了加裝旋轉變壓器IC的需要。AUDO MAX係列和MC-ISAR eMotor驅動被設計用於(yu) 支持安全應用。#p#分頁標題#e#
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們