




摘要:零位偏差和漂移是所有傾(qing) 角傳(chuan) 感器都待解決(jue) 的技術難題。本文通過水泡尺旋轉180º找平的古老方法深入研究傳(chuan) 感器的調平原理,建立一套傾(qing) 角傳(chuan) 感器自動調零的理論和方法。采用步進電機和單片機控製技術設計實現自動調零伺服傾(qing) 角傳(chuan) 感器,很好的解決(jue) 了零位偏差,時間漂移和溫度漂移等問題,使傾(qing) 角傳(chuan) 感器的性能得到提高,具有非常重要的應用價(jia) 值。
關(guan) 鍵詞:自動調零;伺服;傾(qing) 角傳(chuan) 感器;零位偏差;漂移
一、引言
傾(qing) 角傳(chuan) 感器是測量關(guan) 於(yu) 水平麵的傾(qing) 斜角的裝置,在土木建築、水文地質、兵器、航空航天、生物醫學等工程技術領域有著廣泛的用途。傾(qing) 角傳(chuan) 感器種類繁多,按照其工作原理可以分為(wei) “固體(ti) 擺”式,“液體(ti) 擺”式,“氣體(ti) 擺”式三種傾(qing) 角傳(chuan) 感器。對於(yu) 固體(ti) 擺式傾(qing) 角傳(chuan) 感器的研究已經比較成熟,且應用廣泛,但其易受外界幹擾,如機械振動衝(chong) 擊;而液體(ti) 擺式傾(qing) 角傳(chuan) 感器具有靈敏度高、耐腐蝕、耐潮濕等特點,但其致命的缺點是溫度變化會(hui) 嚴(yan) 重影響其工作特性,從(cong) 而限製了液體(ti) 擺式傾(qing) 角傳(chuan) 感器的發展和應用;氣體(ti) 擺式傾(qing) 角傳(chuan) 感器結構簡單,抗振動和抗衝(chong) 擊能力強,但其受環境溫度影響較大,測試精度不高。總之,現有的傾(qing) 角傳(chuan) 感器的精度需要較高的成本來提高,並存在零位偏差,時間漂移和溫度漂移等問題。
針對上述問題本文設計了一種基於(yu) 自動調零理論的自動調零伺服傾(qing) 角傳(chuan) 感器,其基本思想源於(yu) 木匠和建築者使用的利用水泡尺旋轉180°找平的古老方法,並采用步進電機及單片機控製技術設計和實現。這種自動調零伺服傾(qing) 角傳(chuan) 感器能很好的解決(jue) 零位偏差,時間漂移和溫度漂移等問題,使傾(qing) 角傳(chuan) 感器的性能得到了提高,具有非常重要的應用價(jia) 值。
二、理論基礎
自動調零伺服傾(qing) 角傳(chuan) 感器是設計用來校正各種來源的零位偏差和漂移。其基本思想來源於(yu) 木匠和建築者使用的利用水泡尺在被測物體(ti) 表麵旋轉180º來找平的古老方法。如果水泡顯示了相同的結果就表示工作正常,否則就指示一個(ge) 等於(yu) 水泡頂點位置差額的一半的錯誤。在本文的應用中,伺服傾(qing) 角傳(chuan) 感器位於(yu) 一個(ge) 輸入軸IA平行於(yu) 其表麵的旋轉圓盤上,當要執行偏移校正操作時可以直接旋轉180º到圓盤的相反位置上,如圖1所示。
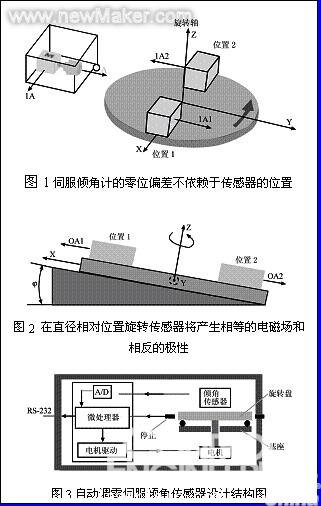
圖1伺服傾(qing) 角計的零位偏差不依賴於(yu) 傳(chuan) 感器的位置。因此,當附於(yu) 水平旋轉圓盤上的傳(chuan) 感器轉到兩(liang) 個(ge) 不同位置時,其輸出將不會(hui) 改變。
傾(qing) 角傳(chuan) 感器在零輸入(傾(qing) 角傳(chuan) 感器的底座位於(yu) 絕對水平的表麵上)時的輸出由兩(liang) 部分組成:
(1)偏移誤差VB定義(yi) 為(wei) 不依賴於(yu) 傾(qing) 角傳(chuan) 感器位置的輸出。
(2)未對準誤差角e主要是由於(yu) 傾(qing) 角傳(chuan) 感器的底座沒有與(yu) 測量軸線絕對平行而造成的。這樣就引起了一個(ge) 與(yu) 未對準角度成比例的輸出電壓Ve(對於(yu) 很小的角度來說,sine≈e)。
如果圖1中的旋轉底座在一個(ge) 絕對水平的平麵上,則很明顯在兩(liang) 個(ge) 位置上傾(qing) 角傳(chuan) 感器的偏移誤差輸出VB和未對準誤差輸出Ve的輸出和為(wei) :
Vo=VB+Ve。(1)
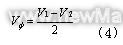
假設旋轉底座相對於(yu) Y軸傾(qing) 斜了角度φ,則分析過程如下,如圖2所示。
很明顯圖2所示的旋轉傳(chuan) 感器時,角度φ在這兩(liang) 個(ge) 位置是相同的。顯然輸入軸線的方向是相反的,這樣輸出電壓的Vφ極性也相反。在位置1和位置2電壓輸出是重疊的:
V1=Vo+Vφ=VB+Ve+Vφ(2)
V2=Vo-Vφ=VB+Ve-Vφ(3)
最後,位置1和位置2的輸出相減(V1-V2=2Vφ)即可得到結果:
一般來說,從(cong) 等式中可以看出偏移誤差和未對準誤差是可以完全消除,從(cong) 而可以得到真實的角度。事實上,這就是自動調零的作用。要把這些理論應用於(yu) 實踐,以下的基本條件必須滿足:
(1)在位置2時的旋轉圓盤的表麵必須與(yu) 位置1的表麵平行。
(2)因為(wei) 傾(qing) 角傳(chuan) 感器事實上是一個(ge) 加速度計,所以在執行誤差校正操作時儀(yi) 器必須靜止,而且要盡量避免震動。
(3)在測量位置的讀數應該在傾(qing) 角傳(chuan) 感器的輸出達到平衡狀態時讀取。
三、係統工作原理和結構
根據上麵提出的自動調零的理論基礎,要實現傾(qing) 角傳(chuan) 感器的自動調零,傾(qing) 角傳(chuan) 感器需要精確旋轉180º。經過對各種微電機的比較,選用易於(yu) 進行精確控製的步進電機來實現平台的旋轉,然後將傾(qing) 角傳(chuan) 感器精確地安裝在此平台上。傾(qing) 角傳(chuan) 感器在兩(liang) 個(ge) 相反位置上的讀數需要用足夠位數、精度和響應速度的A/D轉換器進行轉換,最後利用單片機存儲(chu) 和計算最終結果。其數字輸出結果通過RS-232或者其他形式進行輸出,如圖3所示。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們