




交流伺服驅動器的控製包括信號的測量、濾波、整形、核心算法的實時完成,驅動信號的產(chan) 生和係統的監控、保護等功能。目前數字伺服驅動廣泛采用單片機、數字信號處理器(DSP)、精簡指令計算機(RISC)來實現數字控製算法。隨著矢量控製、直接轉矩控製、無速度傳(chuan) 感器控製、基於(yu) 智能化的係統控製(如模糊控製、人工神經網絡控製等)的應用,使交流伺服驅動的控製算法越來越複雜。單片機、數字信號處理器等由於(yu) 計算能力、實時多任務能力及存儲(chu) 與(yu) 數據空間等有限,同時軟件編程複雜,開發周期長,難以滿足高性能交流伺服驅動器的要求。
國際整流器件公司針對高性能交流伺服驅動的需求,設計出了基於(yu) 硬件實現的完整的伺服驅動控製單片解決(jue) 方案IRMCK201, 適用不同類型的永磁或交流感應電機,具有編碼器位置反饋接口,將運動控製算法通過硬件實現,從(cong) 而省略了編程任務,達到實時控製的目的。 IRMCK201結合IR2175線性電流傳(chuan) 感芯片,IR2136三相逆變器驅動芯片和IRAM 6A-20A功率模塊,組成一個(ge) 完整的伺服驅動係統。
IRMCK201簡介
IRMCK201是基於(yu) 數字同步旋轉矢量控製的交流伺服驅動的單片硬件解決(jue) 方案。圖1所示為(wei) 其基本功能模塊。
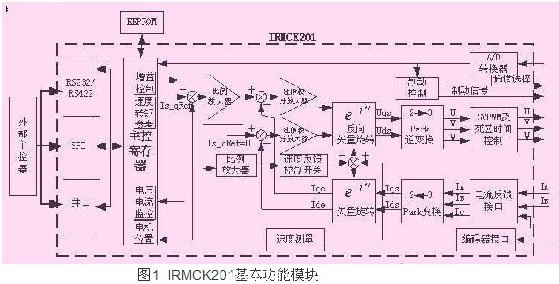
電機三相電流通過Park變換與(yu) 矢量旋轉被分解為(wei) 產(chan) 生磁通的勵磁電流分量id和產(chan) 生轉矩的轉矩電流Iq分量,這兩(liang) 個(ge) 分量具有獨立的比例積分放大電路。芯片可以啟用或禁止速度閉環控製,啟用速度閉環控製時,通過改變給定速度值,給定速度值與(yu) 測量速度之間相互比較將產(chan) 生速度偏差。基於(yu) 這個(ge) 偏差,速度調節器產(chan) 生一個(ge) 對應的轉矩電流Is_qRef;當速度閉環控製禁止,可以直接改變轉矩電流Is_qRef。當Is_dRef=0時,改變轉矩電流 Is_qRef,通過經過Clark變換轉換成靜止的α,β坐標係的電流分量isα、isβ,再經過Park變換轉換成旋轉坐標係下的電流Id,Iq。基於(yu) 旋轉坐標係的給定和實際電流的偏差,電流控製器產(chan) 生輸出電壓Us_q和Us_d(在旋轉坐標係d,q)。電壓Us_q和Us_d被反變換成靜止坐標係下的電壓分量。然後經過空間矢量PWM計算後,給逆變器的功率模塊發出合適的開關(guan) 信號。
IRMCK201主機通信接口包括RS-232/RS-485/RS-422、快速SPI接口和8位並行接口。因此它可以方便與(yu) 多軸主機或控製器進行通信,通過修改和讀取其主控寄存器來控製輸出。IRMCK201也可以獨立運行而不需要外部主機參與(yu) 控製,其運行參數通過外部EEPROM來保存,上電自動從(cong) EEPROM中讀取參數。
IRMCK201具有編碼器接口,正交信號輸入頻率可達1MHz,很容易組成位置閉環控製係統。IRMCK201還具有HALL A/B/C接口,A/B/C可以單獨輸入也可以組合輸入,用來指示轉子位置。
IRMCK201還具有A/D轉換信號接口,直流母線電壓反饋及過壓製動控製接口。可以通過A/D接口輸入模擬參考電壓來改變輸出轉速或輸出轉矩。同時芯片具有PWM輸出,通過簡單低通濾波可以作為(wei) D/A信號輸出,驅動指示儀(yi) 表。通過寄存器的設置,可以選擇指示母線電壓、V相電壓、W相電壓、速度參考值、速度反饋值、Iq參考值、Uq、Ud、Iq或Ib等。
交流伺服驅動係統硬件單元電路設計
基於(yu) IRMCK201的交流伺服驅動係統的硬件設計主要包括高壓主電路設計、功率驅動電路設計、電流電壓采集電路及過流過壓保護電路設計、編碼器位置反饋電路設計、主機接口電路及外部接口電路設計幾個(ge) 部分。
主電路設計
高壓主電路包括EMC濾波電路、啟動衝(chong) 擊延緩電路、整流濾波電路、過流、過壓、欠壓檢測電路。電源可以采用220V單相交流電壓,也可以采用三相220V交流電壓通過整流濾波得到高壓母線直流電壓。
功率驅動電路的設計
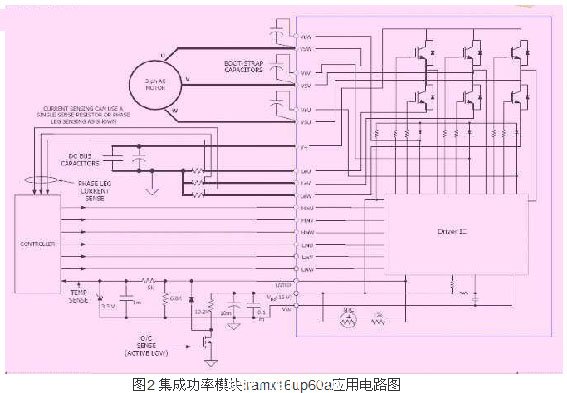
IRMCK201提供了芯片提供三組SVPWM輸出,通過光電隔離,可以與(yu) IGBT模塊或功率MOSFET的驅動電路連接。目前集成三相橋式 IGBT模塊很多,IR公司也提供了幾種規格的集成功率模塊,如iramx16up60a模塊,包含6個(ge) NPT IGBT 芯片, 每一個(ge) 都有自己的分立柵級電阻, 6個(ge) 整流二極管, 1個(ge) 三相單片集成IC, 1個(ge) 柵極驅動芯片, 3個(ge) 具有限流電阻器和一對過溫保護的NTC熱敏電阻/電阻的陰極負載二極管,因而可以大大簡化功率驅動電路的設計。圖2為(wei) 該模塊的典型應用圖。
主機接口電路
IRMCK201提供了多種與(yu) 外部主機通信方式,主機可以通過RS-232/RS-422/485、SPI接口或8位並行接口來配置和監控係統的運行。RS-232/RS-422/485通信方式可以通過硬件選擇,通過MAX232進行電平轉換,RS-232接口允許PC直接對其進行寄存器的配置修改及狀態讀取,通信波特率可以通過外部引腳來選擇。SPI接口方式中,芯片處於(yu) 從(cong) 方式,通信最高時鍾可達8MHz,可以實現與(yu) 主機高速通信。不同通信方式通常都處於(yu) 激活狀態,可以相互切換,但不能同時運行。
伺服電機電流檢測電路設計
通常伺服電機的電流檢測通過在電機相電路中串連一個(ge) 小電阻,測量電阻壓降,通過A/D轉換進行采集。IRMCK201提供與(yu) ADS7818 A /D轉換器接口,通過多路複用器4052可以輸入四路模擬信號,作為(wei) 轉速或轉矩大小控製的模擬輸入、直流母線電壓的檢測,還可以檢測通過其他電流傳(chuan) 感器如 HALL電流傳(chuan) 感器送來的兩(liang) 路相電流信號。IRMCK201芯片除了采用這種方法進行電流檢測之外,還提供與(yu) IR2175線性數字電流傳(chuan) 感芯片直接接口引腳,用來測量伺服電機的相電流。
IR2175線性電流傳(chuan) 感芯片作用是將電流信號從(cong) 伺服電機的高端驅動電路轉換倒低端驅動電路,以便控製電路進行處理。在伺服電機相電路中串聯一個(ge) 取樣電阻,隨著電機相電流的變化,取樣電阻上麵產(chan) 生一個(ge) 很小的交流電壓信號作為(wei) IR2175電流傳(chuan) 感器IC的輸入。 IR2175的最大輸入電壓為(wei) +260mV,因此,過載電流流過取樣電阻時所產(chan) 生電壓應為(wei) 260mV。在IR2175的高端電路中,交流輸入信號被轉換成載頻為(wei) 130kHz的PWM 信號,經過電平轉換,PWM信號被轉換成了以地為(wei) 參考點的信號。
編碼器接口電路設計
IRMCK201帶有編碼器接口電路,可以很方便組成一個(ge) 全閉環伺服控製係統。它可以與(yu) 多種編碼器接口,脈衝(chong) 數可以從(cong) 200PPR到 10000PPR,脈衝(chong) 頻率可以達到1MHz。從(cong) 圖2可以看出,編碼器接口具有相互正交的ENA、ENB編碼器信號及零點標誌信號接口。同時還具有三路 HALL信號輸入,這三路信號既獨立使用,也可以複用。係統上電時可以通過HALL傳(chuan) 感器及Z脈衝(chong) 位置估算編碼器初始值。
控製輸入及狀態指示接口電路設計
控製輸入信號包括啟動、停止、運轉方向、輸出使能、故障複位、主機狀態等;狀態指信號包括係統故障指示、同步指示及兩(liang) 個(ge) 雙色指示燈。可以直接通過輸入引腳控製輸出。
交流伺服驅動器係統設計
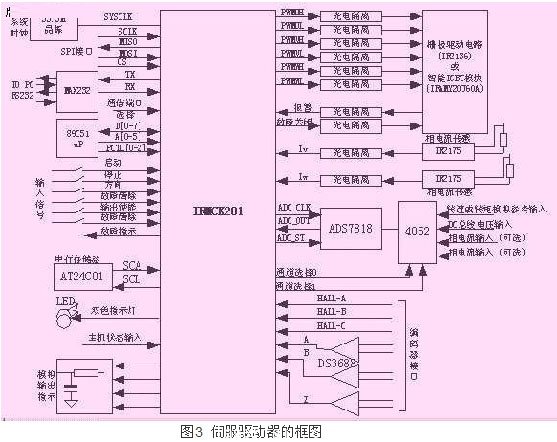
圖3示出通過普通單片機實現的一個(ge) 基於(yu) IRMCK201芯片的伺服驅動器的框圖。#p#分頁標題#e#
結語
采用基於(yu) 硬件控製的SVPWM輸出伺服驅動控製器的設計,具有控製頻率高,反應速度快,控製編程簡單等優(you) 點。基於(yu) IRMCK201的伺服驅動器能以20kHz PWM的更新速率運行,能與(yu) 模擬伺服驅動媲美。IR公司還提供了基於(yu) FPGA實現的交流伺服驅動開發係統來降低成本和定製個(ge) 性化伺服驅動係統。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀




















 關注我們
關注我們