




近年來,隨著工業(ye) PC 機性能的快速發展,可靠性大為(wei) 提高,而價(jia) 格卻大幅度降低,以工業(ye) PC 機為(wei) 核心的控製係統已廣泛被工業(ye) 控製領域所接受。在機床控製領域,采用工業(ye) PC 機,在流行的操作係統下發展通用的數控係統,已成為(wei) 數控技術發展的最新潮流[1]。
激光衝(chong) 擊強化是一種新型的表麵強化技術,它是利用強脈衝(chong) 激光導致的高強度應力波衝(chong) 擊金屬表麵,使材料表層產(chan) 生塑性應變,從(cong) 而提高金屬材料表麵的強度、硬度等機械性能,並獲得表麵殘餘(yu) 壓應力狀態(如圖1所示)。目前,該技術的應用領域已不僅(jin) 僅(jin) 局限於(yu) 強化航空用鋁合金、鈦合金、不鏽鋼、高溫合金等材料,還拓展到航天、汽車、醫學等領域。為(wei) 了提高激光衝(chong) 擊強化技術的自動化程度,開發一套基於(yu) 運動控製器的激光衝(chong) 擊強化數控係統。
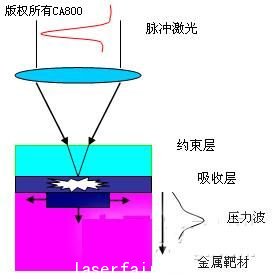
圖1 激光強化處理示意圖
1 數控係統的硬件結構
1.1 Galil運動控製器
在計算機數控係統中,起著關(guan) 鍵作用的組成部分是其中的計算機數字控製裝置和伺服係統,係統的計算速度、實時性、伺服更新速度、資源管理能力、數字通信、精密控製、微量進給等性能都取決(jue) 於(yu) 這兩(liang) 個(ge) 部分。尤其是計算機數控裝置,也就是運動控製單元,更是數控係統的核心單元模塊,數控係統的性能、精度一定程度上依賴於(yu) 運動控製單元的快速控製能力,由它可完成數控係統中實時性要求比較高的插補、位置控製、開關(guan) 量I/ O 控製任務,實現CNC係統中多軸聯動的插補計算、位置控製等功能,使用這樣的運動模塊並輔助以其他的設備部件,可以方便靈活地構建應用於(yu) 不同場合的運動控製係統[2]。
PCI總線DMC-1842運動控製器是美國GALIL公司產(chan) 品,采用32位微處理器,可控製1~4軸,其本身具有多軸直線插補、圓弧插補、輪廓控製、電子齒輪和電子凸輪(ECAM)等功能,板上有2M Flash 可擦寫(xie) 存儲(chu) 器及2M RAM,可存儲(chu) 用戶程序、數量、數組和控製程序,並可脫機運行。
DMC1842控製器主要性能:
▲ 接收12MHz伺服編碼器反饋信號,2MHz步進電機命令(脈衝(chong) +方向)。
▲ 帶速度及加速度前饋、積分限製、Notch及低通濾波器的PID。采樣周期62.5μs/軸
▲ 運動方式:JOG,PTP定位,輪廓,直線、圓弧插補,電子齒輪,ECAM
▲ 2M非易失存儲(chu) 器: 存儲(chu) 應用程序,變量, 陣列;2M RAM
▲ 每軸正、反向限位及回零輸入
▲ 通用I/O:8/8
▲ 高速位置鎖存及比較(0.1μs)
▲ 無刷伺服電機正弦波換向控製
▲ 上電自動程序運行
另外,配套的WSDK軟件工具用於(yu) 伺服性能自動調整和分析,ActiveX控件用於(yu) VB編程,擴展DLL文件用於(yu) C/C++高級應用編程,使得開發和應用變得方便。
1.2 機械本體(ti) 結構概述
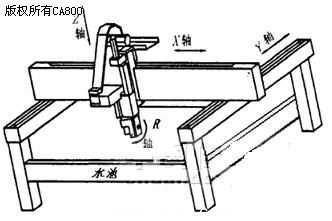
圖2:係統機械本體(ti) 結構示意圖
數控係統的機械本體(ti) 采用龍門式結構[3],共有四個(ge) 傳(chuan) 動軸,分別為(wei) X軸、Y軸、Z軸和R軸。X軸、Y軸和Z軸通過伺服電機連接絲(si) 杠驅動,可以實現三軸聯動,其行程分別為(wei) 800mm、600mm和400mm.。轉軸由伺服電機經減速器減速來驅動,可連續運動,承重10kg。工作台麵為(wei) 一水池,水作為(wei) 衝(chong) 擊強化的約束介質。在實際工作中,可以利用轉台裝夾工件(如葉片)通過工作台運動實現不同部位的強化,也可以通過運動軸上的反射鏡實現光斑的移動,從(cong) 而實現雙工作方式。
1.3 控製係統硬件結構
該激光衝(chong) 擊強化數控係統采用工業(ye) PC機為(wei) 基礎,在工控機主板上的PCI擴展槽插上DMC1842多軸運動控製器,形成該係統的控製中心。工控機上的 CPU與(yu) 運動控製器上的CPU構成主從(cong) 式雙微處理器結構,兩(liang) 個(ge) CPU各自實現相應的功能,其中DMC1842主要完成機床四軸的運動控製和相關(guan) 開關(guan) 量的輸入輸出控製。工控機則實現整個(ge) 係統的管理功能。數控係統的硬件框圖如圖3所示。其中,PICM2900互聯模塊將控製器電纜轉換成插線端子方式。
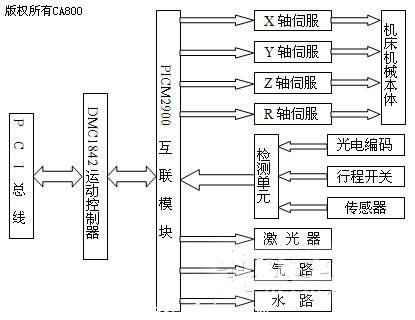
圖3:係統硬件框圖
2 軟件開發
係統采用Visual Basic語言與(yu) Galil卡自身的語言綜合開發。其中,VB主要用於(yu) 界麵設計、初始化及參數設置、指令轉換以及和運動控製卡的通訊[4]。整個(ge) 係統能實現的功能主要有:ISO標準G指令編程、圓弧與(yu) 直線插補、運動路徑的演示、故障監控與(yu) 顯示以及各個(ge) 坐標值的實時顯示等。
兩(liang) 種語言的合理運用,使得編程變得簡單。例如,X軸以JOG方式運動,用兩(liang) 個(ge) 按鈕分別控製該軸啟動與(yu) 停止。相應的初始化完成後,程序如下:
Private Sub Command1_Click() ’X軸啟動
Command1.SetFocus
DMCShell1.Command = "JG10000;"
DMCShell1.Command = "BGX"
End Sub
Private Sub Command2_Click() ’停止運動
Command2.SetFocus
DMCShell1.Command = "STX"
End Sub
3 結論
本文提出的係統控製方案中,由於(yu) 采用了基於(yu) 工業(ye) PC機的控製平台,並結合了Galil運動控製器良好的控製性能,使係統具有較強的開放性和可擴充性,人機界麵友好。係統硬件具有較強的穩定性、實時性,可靠性好,運行速度快,控製精度高。
參考文獻
[1] 章聲. 基於(yu) PMAC的數控火焰切割機數控係統開發.機電工程,2002, 19(2):38-40
[2] 吳忠. 基於(yu) Galil運動控製器的切割機控製係統.機電工程,2003, 20(4):44-46
[3] 李顯,殷蘇民. 基於(yu) PMAC的玻璃雕刻機數控係統的研究和開發.蘭(lan) 州工業(ye) 高等專(zhuan) 科學校學報,2003, 10(4):25-28
[4] 王浩.高級Windows程序設計技術[M].上海:同濟大學出版社,1997
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們