




FANUC數控係統是最暢銷的機床控製係統之一。目前,在國內(nei) 使用的FANUC數控係統主要有0係統和0i係統。針對廣大用戶的實際情況,本文簡要敘述這兩(liang) 種係統的連接及調試,掌握了這兩(liang) 種係統,其它FANUC係統的調試則迎刃而解。
1 係統與(yu) 機床的連接
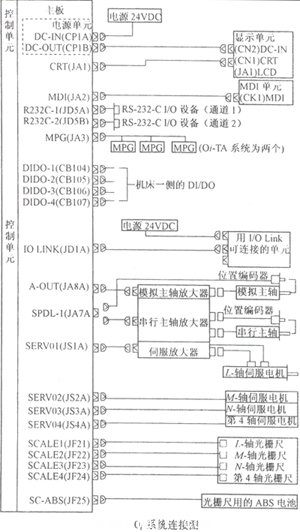
0i係統的連接圖如下圖,0係統和其他係統與(yu) 此類似。圖中,係統輸入電壓為(wei) DC42 V±10%,約7A。伺服和主軸電動機為(wei) AC200V(不是 220V)輸入。這兩(liang) 個(ge) 電源的通電及斷電順序是有要求的,不滿足要求會(hui) 出現報警或損壞驅動放大器。原則是要保證通電和斷電都在CNC的控製之下。具體(ti) 時序請見“連接說明書(shu) (硬件)”。
其它係統如 0 係統 , 係統電源和伺服電源均為(wei) AC200V 輸入。
伺服的連接分 A 型和 B 型 , 由伺服放大器上的一個(ge) 短接棒控製。A 型連接是將位置反饋線接到 CNC 係統;B 型連接是將其接到伺服放大器。 Oi 和近期開發的係統用 B 型。0係統大多數用 A 型。兩(liang) 種接法不能任意使用 , 與(yu) 伺服軟件有關(guan) 。連接時最後的放大器的 JX1B 需插上 FANUC 提供的短接插頭 , 如果遺忘會(hui) 出現 #401 報警。另外 , 若選用一個(ge) 伺服放大器控製兩(liang) 個(ge) 電動機 , 應將大電動機電樞接在 M 端子上 , 小電動機接在 L 端子上 , 否則電動機運行時會(hui) 聽到不正常的嗡嗡聲。
FANUC 係統的伺服控製可任意使用半閉環或全閉環 , 隻需設定閉環型式的參數和改變接線 , 非常簡單。
主軸電動機要的控製有兩(liang) 種接口 : 模擬 (0~1OVDC) 和數值 (串行傳(chuan) 送) 輸出。模擬口需用其它公司的變頻器及電動機。
用 FANUC 主軸電動機時 , 主軸上的位置編碼器 ( 一般是 1024 條線) 信號應接到主軸電動機的驅動器上 (JY4 口) 。驅動器上的 JY2 是速度反饋接口, 兩(liang) 者不能接錯。
目前使用的 I/0 硬件有兩(liang) 種 : 內(nei) 裝 I/0 印刷板和外部 I/0 模塊。 I/0 板經係統總線與(yu) CPU 交換信息;I/0 模塊用 I/O LINK 電纜與(yu) 係統連接 , 數據傳(chuan) 送方式采用串行格式 , 所以可遠程連接。編梯形圖時這兩(liang) 者的地址區是不同的。而且 ,I/0 模塊使用前需首先設定地址範圍。
為(wei) 了使機床運行可靠 , 應注意強電和弱電信號線的走線、 屏蔽及係統和機床的接地。電平 4.5V 以下的信號線必須屏蔽 , 屏蔽線要接地。連接說明書(shu) 中把地線分成信號地、機殼地和大地。請遵照執行連接。另外,FANUC係統、伺服和主軸控製單元及電動機的外殼都要求接大地。為(wei) 了防止電網幹擾,交流的輸入端必須接浪湧吸收器(線間和對地)。如果不處理這些問題,機床工作時會(hui) 出現#910、#930報警或是不明原因的誤動作。
2 調試步驟
2.1 步驟一:接線
按照設計的機床電櫃接線圖和係統連接說明書(shu) (硬件)中(書(shu) 號:B-61393或B-63503)繪出的接線圖仔細接線。
2.2 步驟二:通電
拔掉CNC係統和伺服(包括主軸)單元的保險,給機床通電。如無故障,裝上保險,給機床和係統通電。此時,係統會(hui) 有#401等多種報警。這是因為(wei) 係統尚未輸入參數,伺服和主軸控製尚未初始化。
2.3 步驟三:設定參數
①. 係統功能參數(既所謂的保密參數):這些參數是訂貨時用戶選擇的功能,係統出廠時FANUC已經設好,0C和0i不必設。但是,0D(0TD和0MD)係統,須根據實際機床功能設定#932--#935的參數位。機床出廠時係統功能參數表必須交給機床用戶。
②.進給伺服初始化:將各進給軸使用的電機的控製參數調入RAM區,並根據絲(si) 杠螺距和電機與(yu) 絲(si) 杠間的變速比配置CMR和DMR。設參數SVS,使顯示器畫麵顯示伺服設定屏(Servo Set)。0係統設參數#389/0位=0;0i係統設參數#3111/0位=1。然後在伺服設定屏上設下列各項:
·初始化位置0。此時,顯示器將顯示P/S 000報警,其意義(yi) 是要求係統關(guan) 機,重新啟動。但不要馬上關(guan) 機,因為(wei) 其它參數尚未設入。應返回設定屏繼續操作。
·指定電機代碼(ID)。根據被設定軸實際使用的電機型號在“伺服電機參數說明書(shu) (B—65150)”中查出其代碼,設在該項內(nei) 。
·AMR設0。
·設定指令倍比CMR。CMR=命令當量/位置檢測當量。通常設為(wei) 1。但該項要求設其值的1倍,所以設為(wei) 2。
·設定柔性變速比(N/M)。根據滾珠絲(si) 杠螺距和電機與(yu) 絲(si) 杠間的降速比設定該值。計算公式如下:

計算中1個(ge) 脈衝(chong) 的當量為(wei) 1μm。式中的分子實際就考慮了電機軸與(yu) 絲(si) 杠間的速比。將該式約為(wei) 真分數,其值即為(wei) N和M。該式適用於(yu) 經常用的伺服半閉環接法,全閉環和使用分離型編碼器的半閉環另有算法。
·設定電機的轉向。111表示電機正向轉動,-111為(wei) 反向轉動。
·設定轉速反饋脈衝(chong) 數。固定設為(wei) 8129。
·設定位置反饋脈衝(chong) 數。固定設為(wei) 12500。
·設定參考計數器容量。機床回零點時要根據該值尋找編碼器的一轉信號以確定零點。該值等於(yu) 電機轉一轉的進給軸的移動脈衝(chong) 數。
按上述方法對其它各軸進行設定,設定完成後係統關(guan) 機並重新開機,伺服初始化完成。
③.設定伺服參數:0係統#500--#595的有關(guan) 參數;0i#1200--#1600的有關(guan) 參數。這些是控製進給運動的參數,包括:位置增益,G00的速度,F的允許值,移動時允許的最大跟隨誤差,停止時允許的最大誤差,加/減速時間常數等等。參數設定不當,會(hui) 產(chan) 生#4x7報警。
④. 主軸電動機的初始化 設定初始化位和電動機的代碼。隻有 FANUC 主軸電動機才進行此項操作
⑤. 設定主軸控製的參數 設定各換檔檔次的主軸最高轉速、換檔方法、主軸定向或定位的參數、模擬主軸的零漂補償(chang) 參數等。
⑥. 設定係統和機床的其它有關(guan) 參數 參數意義(yi) 見 " 參數說明書(shu) " 。
2.4 步驟四:編梯形圖,調機
要想主軸電動機轉動 , 必須把控製指令送到主軸電動機的驅動器 , 頭 $SIP 是這一指令的控製信號 , 因此在梯 形圖中必須把它置 1。
不同的 CNC 係統使用不同型式的 PMC, 不同型式的 PMC 用不同的編程器。 FANUC 近期開發的PMC 可以方便地用軟件轉換。可以用編輯卡在 CNC 係統上現場編製梯形圖 , 也可以把編程軟件裝入 PC機 , 編好後傳(chuan) 送給 CNC 。近期的係統中梯形圖是存儲(chu) 在 F- ROM 中 , 因此編好的或傳(chuan) 送來的梯形圖應寫(xie) 入 F-ROM, 否則關(guan) 機後梯形圖會(hui) 丟(diu) 失。編梯形圖最重要的注意點是一個(ge) 信號的持續 (有效) 時間和各信號的時序 (信號的互鎖) 。在 FANUC 係統的連接說明書(shu) (功能) 中對各控製功能的信號都有詳細的時序圖。調機時或以後機床運行中如發現某一功能不執行 , 應首先檢查接線然後檢查梯形圖。
調機實際上是把 CNC 的I/0 控製信號與(yu) 機床強電櫃的繼電器、開關(guan) 、閥等輸入 / 輸出信號一一對應起來 , 實現所需機床動作與(yu) 功能。為(wei) 方便調機和維修 ,CNC 係統中提供了 PMC 信號的診斷屏幕。在該屏上可以看到各信號 的當前狀態。
#p#分頁標題#e#綜上所述 , 調機有三個(ge) 要素 : 接線、編梯形圖和設置參數。調試中出現問題應從(cong) 這三個(ge) 方麵著手處理 , 不要輕易懷疑係統。梯形圖調好後應寫(xie) 人 ROM。0 係統用的是 EPROM, 所以需要專(zhuan) 用的寫(xie) 入器;Oi 等其它係統用 F-ROM, 隻需在係統上執行寫(xie) 入操作即可。
FANUC 係統運行可靠 , 調試容易 , 因此在國內(nei) 外得到了廣泛應用。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們