




凡使用過FANUC係統的技術人員都知道,FANUC 係統的PMC 軸控製指令都是由PMC 指令控製的, 而PMC 指令的執行是按先進先執行的固定格式運行的。我們(men) 的控製程序設計就要按照這一規律, 根據控製要求編製符合動作順序要求的滿足"先進先執行" 規律的控製程序。下麵舉(ju) 例談談FANUC OMC 係統PMC軸的控製程序設計。
1 PMC 軸的控製要求
我們(men) 的應用實例中, 要求有4個(ge) CNC 控製軸和1個(ge) 固定動作的PMC軸(本文定為(wei) W 軸)。本文僅(jin) 談PMC 軸的控製程序設計。
控製要求如下(見圖1) : (1) 要求W軸參考點到上返向點的速度和距離可用CNC程序修改;(2) 暫停時間可用D參數修改;(3) 往複速度和距離可用CNC程序修改;(4) 往複速度麵板可調。
根據圖1, 確定其數據傳(chuan) 送順序如下:(1)傳(chuan) 送W軸零位到A點的指令(01H)、速度(Vb) 和距離(Sa)。 (2) 傳(chuan) 送到達 A 點後的暫停指令(04H) 、暫停時間(Tα)。(3) 傳(chuan) 送A 點到 B 點的指令 (01H) 、速度 (Vb) 和距離 (Sb)。 (4) 傳(chuan) 送到達 B 點後的暫停指令 (04H)、暫停時間 (Tb) 。 (5) 傳(chuan) 送 B 點到 A 點的速度(-Vb) 和距離 (-Sb) 。 (6)M29 指令動作後 , 傳(chuan) 送 W 軸回零指令。
其中 ,AB 點之間為(wei) 往複運動 ,M28 起動往複運動 ,M29 終止其往複運動並執行回零 , 本應用實例中暫停時間 (Ta) 由 D 參數修改。

圖 1PMC 軸控製要求動作圖
2 PMC 軸的指令數據傳(chuan) 送要求
我們(men) 從(cong) FANUC 0MC係統的連接功能手冊(ce) 中可查得PMC軸的指令數據傳(chuan) 送要求,如圖2。PMC軸的指令數據傳(chuan) 送波形圖見圖3。

在圖2中,當命令[1]執行完成後,數據傳(chuan) 送如下:命令[2]→執行緩衝(chong) 器,命令[3]→等待緩衝(chong) 器,命令[4]→輸入緩衝(chong) 器。
命令[2]起動執行後,命令[5]可傳(chuan) 送到CNC中。
3 PMC軸的指令數據接收條件
我們(men) 從(cong) FANUC OMC係統的連接功能手冊(ce) 中可查得PMC軸的指令數據接收條件,見表1。
4 PMC軸的控製程序設計
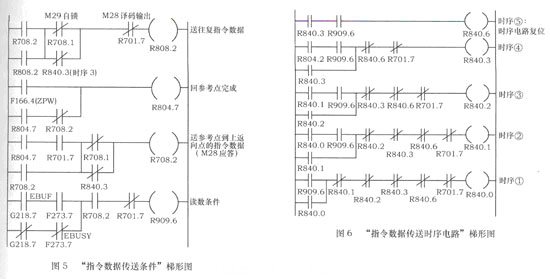
根據PMC軸的控製要求,我們(men) 設計了指令數據傳(chuan) 送圖(見圖4)、“指令數據傳(chuan) 送條件”梯形圖(見圖5)、“指令數據傳(chuan) 送時序電路”梯形圖(見圖6)和“指令數據傳(chuan) 送”梯形圖(略)。
5 CNC控製程序
% O0099
┊
┊ 其他軸控製程序
N5 M29; 確保 W 軸起動往複運動前在零位
N20#1133=25000; 零點到上返向點的距離 (25000 mm)
N30#1132=10000; 零點到上返向點的速度 (10.Om/min)
N40 M91; 將零點到上返向點的距離和速度
(F196/F162) 送 PMC
N50#1133=3000; 往複運動的距離 (30.000m)
N60#1132=8000; 往複運動的速度 (8.Om/min)
N70M90; 將往複運動的距離和往複運動的速度
(F196/F162) 送 PMC
6 結束語
本設計經過使用, 使用方便、工作可靠, 充分使用了係統的多種功能。但要指出的是, 必須選訂αL係列小慣量電動機, 以確保係統在W軸高速往複運動時不會(hui) 產(chan) 生過流(I2t) 報警。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們