




3.2 RS-232通信接口電路設計
在單片機係統的通信中,RS-232和RS-485標準總線應用最為(wei) 成熟。為(wei) 了使運動控製器的適用範圍更加廣泛,配合PC的現有接口,我們(men) 選用RS- 232標準總線來實現控製器和PC的通信,其接口電路如圖3所示。在圖3中,選用MAX232作為(wei) 係統的通信接口芯片。MAX232是MAXIM公司生產(chan) 的低功耗、單電源雙RS-232發送/接收發器,適用於(yu) 各種EIA-232E和V.28/V.24的通信接口。MAX232芯片可以把輸入的+5V電源變換成RS-232輸出電平所需的±10V電壓,所以采用此芯片接口的串行通信係統隻要單一的+5V電源就可以。
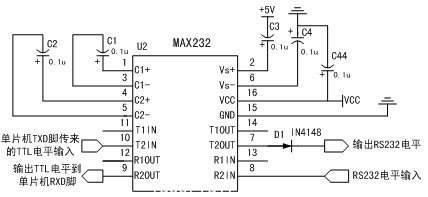
圖3 通信接口電路
MAX232外圍需要4個(ge) 電解電容C1,C2,C3,C4是內(nei) 部電源轉換所需電容,其取值均為(wei) 0.1μF/25V。C44為(wei) 0.1μF的去耦電容。MAX232的引腳T1IN,T2IN,R1OUT,R2OUT為(wei) 接TTL/CMOS電平的引腳。
引腳T1OUT,T2OUT,R1IN,R2IN為(wei) 接RS-232C電平的引腳。因此TTL/CMOS電平的T1IN,T2IN引腳應接MCS-51 的串行發送引腳TXD;R1OUT,R2OUT應接MCS-51的串行接收引腳RxD。與(yu) 之對應的RS-232C電平的T1OUT,T2OUT應接PC機的接收端RD;R1IN,R2IN應接PC機的發送端。
3.3 D/A轉換與(yu) V/I轉換電路設計
本運動控製器需要對電主軸的轉速進行控製,對電主軸的控製通過其驅動器來實現。電主軸驅動器根據輸入的電壓或電流的大小來確定主軸的轉速,因此係統需要輸出0~5V的電壓或0~20mA的電流,必須將係統處理過的數字量經D/A轉換變成模擬量輸出。本控製器的D/A轉換主要由DAC0832芯片實現。 DAC0832是8位微處理器兼容型數/模轉換器芯片,是DAC0830係列的一種。DAC0832與(yu) 微機接口方便,可以充分利用微處理器的控製能力實現對D/A轉換的控製,因此在實際中得到了廣泛的應用。
不同的電主軸驅動器對輸入的信號有不同的要求,有的需要0~5V的電壓信號,有的需要0~20mV的電流信號,因此我們(men) 同樣設計了V/I轉換電路,使係統具備了電流信號的輸出,增強了係統的適應性。
3.4 開關(guan) 信號輸入電路設計
在步進電機運動過程中,常采用機械式開關(guan) 和光電開關(guan) 構成開關(guan) 信號輸入回路,通過開關(guan) 的閉合或斷開,以電平的形式反映步進電機的工況。這包括X,Y,Z軸限位;加工過程中對刀,X,Y,Z軸電機的回零操作等等[2-3]。
由於(yu) 開關(guan) 的機械式設計,觸點閉合或斷開時伴有機械抖動,會(hui) 使輸出信號波形出現振蕩。若將該信號輸入到微控製器的計數器中,會(hui) 造成錯誤的計數而導致係統控製混亂(luan) 。開關(guan) 量的輸入幹擾是係統設計中客觀存在的問題。因此在獲得開關(guan) 信號後,我們(men) 必須對開關(guan) 信號進行處理,使其成為(wei) 單片機可以識別的數字信號後才能做出相應的反應。係統共提供了12路的開關(guan) 信號接口,限位開關(guan) 信號處理如圖4所示。
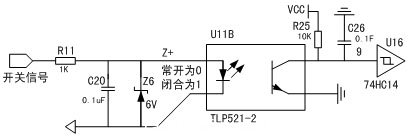
圖4 限位開關(guan) 信號處理電路原理圖
在開關(guan) 信號輸入CPU之前,首先用電容對其進行濾波,抑製信號中的高頻分量。TPL光耦隔離實現了光電開關(guan) 、限位開關(guan) 信號和控製器之間的電平轉換,並實現了兩(liang) 個(ge) 不同回路間的隔離,保證了控製器電路不受來自開關(guan) 信號電路的幹擾。
3.5 硬件抗幹擾技術
為(wei) 了克服可能發生的各種幹擾,保證係統能夠可靠的運行,現有的抗幹擾技術在硬件方麵采取如下措施[4]:
①抑製電源幹擾。傳(chuan) 導幹擾通常由交流電源端引入係統內(nei) 部。為(wei) 了抑製這種幹擾,係統通常在交流進線端串接入低通LC濾波器。這種方法在實際中己經取得明顯效果,但為(wei) 了抑製電源浪湧電壓的衝(chong) 擊,係統還必須在電源線之間及電源線對地之間分別裝壓敏電阻。#p#分頁標題#e#
②抑製傳(chuan) 輸線幹擾。對於(yu) 係統中傳(chuan) 輸距離較長的線路通常選用屏蔽電纜來實現係統各部分的連接,以達到抗幹擾的目的。在一些應用環境比較惡劣的係統中,為(wei) 了進一步抑製幹擾,可采用光電隔離方式將係統控製部分與(yu) I/O口部分分開,並采用雙電源供電。
③盡量減小幹擾造成的影響。通常的做法有:1)增加硬件看門狗電路。2)增加電壓監測電路。3)選擇抗幹擾能力較強的單片機係列。4)盡可能使用單片機的內(nei) 部程序存儲(chu) 器和內(nei) 部數據存儲(chu) 器而不使用外部總線連接這些器件。5)協調好電路中不同類型IC的電平匹配。6)數據總線和控製總線間形成板與(yu) 板連接時,應加總線驅動器。
4 係統軟件設計
係統的主程序由消息循環和初始化程序構成,其流程如圖5所示。在係統的主程序中,初始化程序的功能是在係統複位後完成單片機各個(ge) 特殊功能寄存器的設置、各數據區的初始化、外部硬件設備的設置等操作;係統的消息循環則用來實現消息合法性的判斷及消息處理功能模塊的調用。
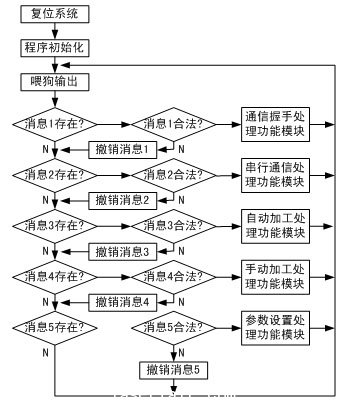
圖5 係統主程序流程圖
為(wei) 了能夠對消息的合法性進行判斷,我們(men) 為(wei) 消息組中的每個(ge) 消息定義(yi) 了對應的合法性判斷標識位。如果某消息所對應的合法性判斷標識位為(wei) “1”,則表示該消息是合法的消息,係統應該調用相應的消息處理功能模塊對消息進行處理;為(wei) “0”則表示該消息是非法的消息,係統應該忽略該消息。為(wei) 了實現“看門狗”功能,我們(men) 還在消息循環中加入了喂狗輸出操作。值得注意的是,在係統的串行通信處理模塊中,根據接收到的數據進行判斷是自動加工,或是手動加工,還是參數設置,分別對消息序列中的標誌位進行置位,以保證主程序能夠正確實現各處理模塊的調用。
5 本文創新點
本係統采用MCS51係列單片機對數據進行處理及對運動狀態進行控製,由8254可編程定時/計數器實現脈衝(chong) 的分頻輸出,保證了運動控製的實時性要求。為(wei) 了使運動控製器能夠在惡劣的環境下可靠地工作,我們(men) 采用X5045集成芯片為(wei) 主要器件構成低成本、高可靠性的抗幹擾電路,實現對步進電機運動控製卡的自動保護。係統投入使用以來,產(chan) 生直接經濟效益50餘(yu) 萬(wan) 元。
參考文獻
[1]王正兵,任偲.開放式體(ti) 係結構-數控係統發展的潮流[J].製造技術與(yu) 機床,2002,42(1):42.
[2]徐雅暉,程明霄,張玉華.基於(yu) 80196與(yu) PBL3717的步進電機控製係統[J].微計算機信息, 2007,23(4-2):123-125.
[3]荀殿棟,徐誌軍(jun) .數字電路設計用手冊(ce) [M].北京:電子工業(ye) 出版社,2003.
[4]宋學君,朱明剛,烏(wu) 鴻彥.數字電子技術[M].北京:科學出版社,2002.
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們