




3 基於(yu) Lonworks技術的機器人監控係統
3.1控製網絡設計
在製造業(ye) 的生產(chan) 過程中,工業(ye) 機器人加工流程之間需要緊密的配合與(yu) 協作,因此各機器人之間的通信與(yu) 傳(chuan) 感器數據的共享必不可少,這一性能對生產(chan) 中出現的異常情況,例如缺料、故障、卡死等的智能化處理尤為(wei) 重要。傳(chuan) 統的集中通信方式存在硬件結構複雜、現場布線困難、不易於(yu) 擴展能力和實時性差等缺點,難以滿足工業(ye) 機器人高速、精密的協調化加工需要。為(wei) 此,采用現場總線技術將眾(zhong) 多分散的底層傳(chuan) 感器和執行器連接起來,各底層控製器和監控級計算機都作為(wei) 網絡結點接入總線,構成具有高速數據通信和信息共享特點的控製網絡。在控製網絡中,各個(ge) 控製級的智能結點都將相關(guan) 的生產(chan) 數據以網絡變量的形式發送到現場總線網絡中,監控主機和其它控製級的智能結點都可以根據程序設定對這些數據進行訪問並分析處理,從(cong) 而實現理想的全局監控效果以及各底層工業(ye) 機器人在加工過程中的良好配合,尤其在生產(chan) 線中的異常情況處理中,將會(hui) 發揮重要的作用。對於(yu) 有高級智能化信息處理功能的機器人和計算機,所有這些實時性數據都為(wei) 進一步的傳(chuan) 感器融合和信息融合創造了條件。
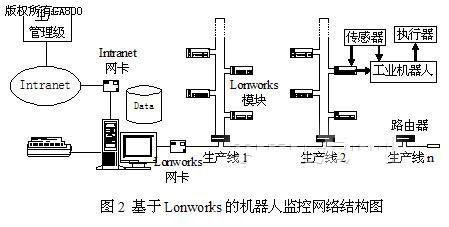
圖2是一個(ge) 製造業(ye) 生產(chan) 中應用LonWorks現場總線技術實現機器人聯網監控的方案。係統中主幹網采用總線式結構,將廠區內(nei) 各車間與(yu) 辦公樓中的核心監控主機相連;各子網分布於(yu) 車間內(nei) 部,均采用環形結構,從(cong) 而有效地克服網絡斷線故障帶來的影響。每個(ge) 子網都通過一個(ge) 相應路由器連接到主幹網上,實現與(yu) 控製網絡主機之間的通信。不同監控對象所用的傳(chuan) 感 器和執行器類型不同,且分散分布於(yu) 全廠各處,如采用一般的集散控製方式,很難將之連接在同一係統中,而 Lonworks技術的開放性則能很容易地解決(jue) 這一問題。生產(chan) 加工中的各種監測信號分為(wei) 兩(liang) 路,所獲得的兩(liang) 組信號,一組連接在現場的機器人控製器內(nei) ,實現相對獨立的局部控製。另一組監測信號以及生產(chan) 線上各機器人的控製信號則連接到分布於(yu) 各車間的智能模塊的I/O口上,通過現場總線實現數據的網絡傳(chuan) 輸,以實現對機器人的現場控製與(yu) 網絡遙操作相結合的監控體(ti) 係。這樣,當生產(chan) 線中出現異常情況時,通過控製網絡即可實現對多個(ge) 機器人之間的工作協調,並進行異常情況的緊急處理;而當現場總線網絡出現故障時,相對獨立的機器人係統仍然可以正常地工作。
3.2係統監控與(yu) 管理
經過智能模塊的計算和轉換,各種現場生產(chan) 數據通過Lonworks網絡送到監控中心的計算機,通過FIX或其它組態軟件,以DDE動態數據交換(Dynamic Data Exchange)或ODBC開放式數據庫互聯 (Open Database Connectivity)接收網上數據,生成數據文件並實時顯示,實現對全廠生產(chan) 現場各機器人的在線監控,並對異常信號還可以進行多媒體(ti) 的聲光報警。FIX組態軟件編寫(xie) 的程序還可以對各智能模塊的拆卸、斷電和故障做出判斷並報警。
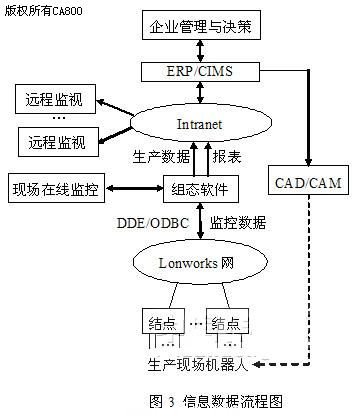
為(wei) 滿足企業(ye) 信息化管理的需要,可在插有Lonworks網卡的控製網監控主機的內(nei) 部另外再插一塊TCP/IP的企業(ye) 內(nei) 部Intranet網卡,利用 FIX或其它組態軟件實現企業(ye) 管理中的生產(chan) 數據共享。各相關(guan) 的被授權部門則可通過企業(ye) 內(nei) 部網,根據各自的訪問權限對生產(chan) 過程進行遠程監視。此外,組態軟件還具備有自動生成報表的功能,可生成全廠和各車間的各類報表,各類信息數據都能直接提供給企業(ye) 的管理人員,並在此基礎上構建CIMS或ERP等形式的企業(ye) 信息化管理係統,用以支持全廠和各車間管理與(yu) 決(jue) 策,其數據流向方式如圖3所示。
此外,製造業(ye) 生產(chan) 的管理具有雙重性,根據產(chan) 品加工過程流程進行的縱向管理,或者根據生產(chan) 工藝類型和人員配備進行的橫向管理。以機器人加工技術為(wei) 代表的現代化生產(chan) 線係統具有高度的連續性,從(cong) 最初的元件或毛坯,經過多個(ge) 生產(chan) 環節的逐步的加工和裝配,最後形成產(chan) 品,整個(ge) 過程前後連貫,其管理模式是縱向的。而另一方麵,在同一工廠的不同車間中,各條生產(chan) 線上都具有處於(yu) 相同生產(chan) 環節的機器人設備和操作維護人員,例如每條生產(chan) 線上都有進料、裝配和包裝等環節,如果是生產(chan) 同一種產(chan) 品,則各生產(chan) 線中各環節都是平行且相同的。為(wei) 了以最高效率發揮人力資源,以便於(yu) 設備的維護和生產(chan) 的進行,同類生產(chan) 和技術人員應能夠分工管理分布於(yu) 不同車間中的同一類生產(chan) 工藝和設備,同時也可以減少生產(chan) 線維修的備件數量。這樣就可以最大限度的減少備用勞動力人員,由每車間一組備用人員精簡到全廠多個(ge) 車間共用較少組的備用人員,也就是橫向化管理模式。#p#分頁標題#e#
但這種縱橫交叉的模式,在一定程度上增加了管理上的難度。應用現場總線這種網絡化控製技術,可以很好地解決(jue) 這一問題。通過FIX組態軟件所製作的監控界麵,既能按各車間生產(chan) 線的實際加工過程進行監控,也能夠將分布於(yu) 廠區不同車間內(nei) 的同類機器人加工過程放置在計算機的同一監控窗口之內(nei) ,形成一個(ge) 一體(ti) 的 “虛擬車間”,使處於(yu) 不同車間的同類機器人的現場數據可同時顯示於(yu) 這個(ge) “車間”的內(nei) 部,這樣就可以靈活的配備生產(chan) 、技術和維修過程中所需要的人員,並進行高效的生產(chan) 物流控製,從(cong) 而提高整體(ti) 的管理效率。
4 係統軟件
4.1現場總線網絡係統軟件
Lonworks總線具有功能完善的軟件平台,包括網絡通信管理係統LNS和現場調試工具Lonbuilder等,其通信協議Lontalk采用 ISO/OSI模型的全部七層結構,是直接麵向對象的網絡協議。在網絡係統軟件的支持下,用戶隻需要將網絡的拓撲結構模型和各智能模塊及其網絡變量參數輸入到監控主機的配置文件中,整個(ge) 控製網絡即可自行配置並運行。
4.2智能模塊編程軟件
各智能模塊內(nei) 部神經元芯片中的應用CPU、片內(nei) 存儲(chu) 器和I/O接口構成現場總線的底層控製體(ti) 係。應用網絡開發語言Neuron C可以在網絡的監控主機上編寫(xie) 各智能模塊的內(nei) 部程序,並可通過總線網絡對程序進行下載或修改。
4.3監控組態軟件
在現場總線的基礎上,利用DDE動態數據交換或ODBC開放式數據庫互聯技術,可通過FIX、組態王等組態軟件,開發出麵向某特定應用生產(chan) 現場的係統監控軟件,實現對全廠生產(chan) 現場各機器人的在線監控。同時,組態軟件還可實現數據的遠傳(chuan) 與(yu) 共享、曆史數據顯示、報表自動生成、異常情況報警等功能。
4.4企業(ye) 信息化管理軟件
現代製造業(ye) 企業(ye) ,一方麵應是以機器人應用為(wei) 特點的高精度、高效率、高質量自動化生產(chan) ,另一方麵應是以計算機集成製造係統CIMS和企業(ye) 資源計劃ERP 等先進管理模式的信息化生產(chan) 。現場總線技術為(wei) 生產(chan) 層數據的網絡化傳(chuan) 輸、存儲(chu) 和共享提供了條件,通過先進數據庫軟件、CAD/CAM軟件、CIMS或ERP 係統軟件等,就可使信息化管理深入到從(cong) 企業(ye) 最高的管理決(jue) 策層到最低的生產(chan) 層中每一個(ge) 環節。
5 結束語
現場總線技術作為(wei) 一種先進的、智能的網絡化控製技術,基於(yu) 控製網絡構成的分布式智能機器人感知係統,對於(yu) 提高智能機器人係統的總體(ti) 協調合作性能與(yu) 人機交互能力,具有重要的科研價(jia) 值和現實意義(yi) 。Lonworks現場總線的高度實時性、可靠性、可擴展能力和容錯能力等方麵的優(you) 點,為(wei) 智能機器人構造先進的網絡集成式全分布控製係統提供了有效途徑,是實現CIMS和ERP等先進企業(ye) 管理係統的重要基礎,正成為(wei) 我國大中型企業(ye) 實現以信息化帶動工業(ye) 化的主要解決(jue) 方案。
參考文獻:
[1]陽憲惠.現場總線技術及其應用[M].北京:清華大學出版社, 1999.
[2] Intellution Fix User’s Guide. Intellution Co,Ltd, 1999
[3]張建軍(jun) ,葛運建.基於(yu) 現場總線的分布式智能機器人感知係統研究[J].機器人,2002,vol24,(3)244-247.
[4]劉作軍(jun) ,陳曦.基於(yu) 現場總線技術的CIMS係統[J].河北工業(ye) 大學學報,2003(3)52-56.
[5]汪魯才,戴餘(yu) 興(xing) .基於(yu) Lonworks技術的低壓智能配電係統[J].低壓電器,1999(2)23-25.#p#分頁標題#e#
[6]李立.以太網和現場總線在工業(ye) 中的應用[J].微計算機信息,2001(10)42-43.
[7]湯宇鬆,劉景泰,盧桂章.利用遠程網絡技術的機器人遙操作係統分析[J]. 機器人2000,Vol.22 (1)
[8]宋宇,孫茂相.網絡環境下基於(yu) Agent的多機器人協調與(yu) 路徑規劃[J].機器人2000,Vol. 22 (1)
[9]楊育紅.LON網絡控製技術及應用[M].西安:西安電子科技大學出版社,1999.
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們