





神龍汽車有限公司武漢一廠總裝S1線塗膠機器人自投產(chan) 以來,一直使用菲尼克斯電氣的LOOP總線,該總線產(chan) 品自2005年就已經停產(chan) ,無法采購,庫存備件也已經為(wei) 零,一旦出現故障就麵臨(lin) 停線的風險。針對機器人的工作特點,我們(men) 決(jue) 定采用無線模塊和FIELD-LINE總線模塊相結合的方案,對機器人的總線進行更換,該項目由總裝維修在高溫假期間自改完成。
改造目標
此次改造的目的是淘汰老化已停產(chan) 的LOOP總線模塊CONTROL ENGINEERING China版權所有,將其全部更換為(wei) 菲尼克斯電氣目前的主流產(chan) 品。S1線的ABB塗膠機器人外圍共有15個(ge) LOOP總線模塊,其中有6個(ge) 安裝在機器人端拾器上,其餘(yu) 的9個(ge) 分別安裝在前、後風窗和塗膠泵站上;根據這個(ge) 特點,我們(men) 的改造方案是將前風窗、後風窗和塗膠泵站上的9個(ge) LOOP總線模塊更換為(wei) FIELD-LINE總線模塊,將機器人端拾器上的6個(ge) LOOP總線模塊更換為(wei) 無線模塊。圖1是改造之前機器人總線的CMD程序截圖,可以看出從(cong) "4.17模塊"到"4.31模塊"一共15個(ge) 模塊都是使用的LOOP總線,而從(cong) "4.0模塊"到"4.16模塊"使用的都是菲尼克斯電氣的IN-LINE總線(該總線模塊屬於(yu) 通用型,沒有停產(chan) 的風險)。
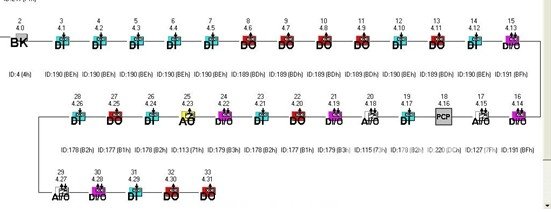
圖1 改造之前的機器人總線CMD組態
方法和難點
先將機器人程序、PLC程序和CMD程序全部備份,再將前風窗、後風窗、機器人端拾器和膠站上的總線模塊做好標記後拆除。
拆除舊模塊後,按照之前設計的CMD組態來固定新模塊,圖2所示為(wei) 新CMD組態,其中"4.0模塊"到"4.16模塊"沒有更換,取消了原有的"4.17"到"4.31模塊",改成了3個(ge) 站點,分別是前風窗、後風窗和膠站(機器人端拾器使用的是無線模塊,受控於(yu) "7.2"和"7.6"這兩(liang) 個(ge) 無線基站模塊,並不單獨組成一個(ge) 站點)。
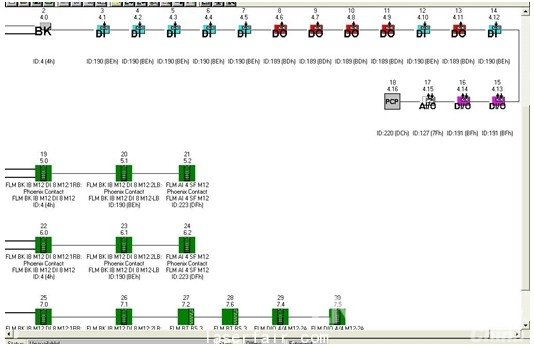
圖2 改造之後的機器人總線新CMD組態
安裝完模塊後,就開始進行電源接線。在原有的LOOP總線模式下,所有的模塊被電源線串成一個(ge) 環形(以機器人為(wei) 例,LOOP環的電源線從(cong) 電櫃中的LOOP總線分支模塊出來,經過前風窗-機器人端拾器-後風窗-膠站控製工程網版權所有,最後再回到電櫃中的LOOP總線分支模塊),這樣做的最大問題是當這個(ge) LOOP環斷開時(比如電纜斷路),很難立即判斷出到底是哪一段出現斷點(可能是電櫃到前風窗,或者前風窗到機器人端拾器,又或者是機器人端拾器到後風窗,還有可能是後風窗到膠站控製工程網版權所有,或是膠站到電櫃),就像串聯電路一樣,很難判斷故障的根源。在這次改造中www.cechina.cn,我們(men) 決(jue) 定摒棄這種連接方式,而采用並聯電路的方式,即以電櫃為(wei) 中心,同時分出四路電源,分別給前風窗、後風窗、膠站和機器人端拾器上的總線模塊供電,四路電源互不幹涉。這樣做的好處是,如果某一個(ge) 站點斷電,可以很容易查到是哪一路電源線的問題。
完成了電源接線並通電測試後www.cechina.cn,就開始了最為(wei) 繁瑣的信號接線和對點工作。在前風窗和後風窗站點上各有一個(ge) 模擬量輸入模塊,作用是將兩(liang) 個(ge) 位移傳(chuan) 感器發出的0~10V信號轉化反應到程序中,在觸摸屏上顯示出來。完成接線後,手動測試時我們(men) 發現,實際測量值和以前有很大的不同,而且前後風窗都是如此,這樣基本可以排除模塊本身的故障。經過仔細比較,發現LOOP總線模塊和FIELD-LINE總線模塊的針腳定義(yi) 不完全相同,這導致了測量值出現偏差,將位移傳(chuan) 感器的進線更改為(wei) 適應新模塊的接法後,再進行測量,測量值和以前完全一樣。
技術原理
1.無線總線的優(you) 點
(1)由於(yu) 塗膠機器人工作方式的限製,總線模塊必須固定在機器人的端拾器上,隨機器人一起運動,原來采用LOOP總線方式時,連接總線模塊的既有電源電纜,又有信號電纜,在護管中互相摩擦,幾乎每隔3個(ge) 月就要進行整體(ti) 更換;采用了無線技術後,護管中電纜的數量由原來的3根減少到1根,取消了信號電纜,實現了我們(men) 對設備自由移動和無損耗傳(chuan) 輸介質的需求。
(2)機器人島中的現場情況、障礙以及狹小的空間決(jue) 定了無線傳(chuan) 輸的可靠性、實用性要遠遠超過傳(chuan) 統的複雜布線。采用了無線技術以後,信號傳(chuan) 輸的可靠性、操作性、優(you) 異的診斷功能以及快速簡單的排障功能都得到了很好的驗證,在安裝調試過程中,無線模塊也能夠快速地接入已有控製係統。
2.無線總線的傳(chuan) 輸
(1)INTERBUS無線總線是靠藍牙傳(chuan) 輸的,最多可聯7個(ge) 從(cong) 站,對帶寬要求較低,傳(chuan) 輸的是小數據包,可以進行快速和穩定的傳(chuan) 輸。由於(yu) 采用的是FHSS(跳頻擴頻)技術和免費頻段,所以可以與(yu) WLAN和手機藍牙等設備並行,不用擔心幹擾源問題。
(2)無線傳(chuan) 輸從(cong) 根本上避免了機器人工作方式易產(chan) 生的抖動、幹擾和丟(diu) 失等弊端,特別是解決(jue) 了信號傳(chuan) 輸量限製的根本問題,實現了係統信息的全采集,提高了可靠性和穩定性,也給操作和維護帶來了方便。
(3)同時提供了係統無線接入點,解決(jue) 了機器人端拾器與(yu) 地麵總線連接的問題。在對總線係統進行調試、參數變更、故障檢查和維護時無需采用以往空中操作或隨行方式,可以在無線係統覆蓋區域內(nei) 的任意位置通過無線客戶端(如筆記本電腦)對係統全部被控點進行操作和監控。
(4)無線傳(chuan) 輸提高了係統的擴展性,將來要想增加I/O點,控製係統隻需增加一套輸入輸出模塊和一個(ge) 無線基站即可。
(5)無線傳(chuan) 輸係統保證了無機械摩損,無需參考點,絕對位置測量,實時檢測,最大限度地實現了機器人的智能化。
3.程序處理
(1)在改造過程中最重要的是程序的編輯,就是在CMD組態中定義(yi) I/O點,將其與(yu) PLC程序中的I/O點一一對應起來。對點有兩(liang) 種方法,第一種方法是在CMD組態的過程數據字中僅(jin) 僅(jin) 定義(yi) 一個(ge) 字(例如E48),這樣在PLC程序中將會(hui) 自動生成I48.0~I48.7這8個(ge) 輸入點,這樣做的話,在CMD組態時工作量很小,但在PLC程序中將麵臨(lin) 大量的程序更改,很容易出錯;第二種方法是在CMD組態時就一個(ge) 一個(ge) 定義(yi) 模塊上的過程數據字(見圖3),這樣做的話,PLC程序部分就完全不需要做任何更改,本文采用了第二種方法。
(2)無線模塊和無線基站的對地址方法:首先確認一個(ge) 無線基站需要帶幾個(ge) 無線模塊,是什麽(me) 類型的,然後將無線基站上的Process data width settings(過程數據字長度)撥至幾(具體(ti) 算法是:無線基站本身占2個(ge) 字CONTROL ENGINEERING China版權所有,DIO模塊每個(ge) 占1個(ge) 字,AIO模塊每個(ge) 占3個(ge) 字,比如一個(ge) 無線基站帶了3個(ge) DIO模塊則過程數據字長度為(wei) 2+1+1+1=5;一個(ge) 無線基站帶了3個(ge) AIO模塊則過程數據字長度為(wei) 2+3+3+3=11),然後再將Device number settings(設備數量設置)撥至1,表示現在對第一個(ge) 無線模塊,再將第一個(ge) 無線模塊上的ID-PLUG插頭插在無線基站的ID-PLUG上,當下麵的指示燈由橙色變成綠色,就表示該無線模塊的地址對完了。
結語
將菲尼克斯電氣無線總線模塊應用在塗膠機器人以及西門子S7型PLC中,這對我們(men) 來說是第一次嚐試,應用在塗膠機器人中能夠充分地發揮它的優(you) 勢,性價(jia) 比很高。這在國內(nei) 無線網絡用在塗膠機器人係統中,特別是機器人可以自動抓取、塗膠和安裝項目中是一個(ge) 全新的嚐試。我們(men) 使用半年以來,不僅(jin) 總線故障率為(wei) 零,保證了後續備件的充足供應,每年還可節省更換備件費用超過5萬(wan) 元。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們