




一、設備說明:
機械手是能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。機械手是最早出現的工業(ye) 機器人,也是最早出現的現代機器人,它可代替人的繁重勞動以實現生產(chan) 的機械化和自動化,能在有害環境下操作以保護人身安全,因而廣泛應用於(yu) 機械製造、冶金、電子、輕工和原子能等部門。
二、工藝要求:
1、 X、Y軸不能出現抖動和甩尾。
2、 在伺服使能抱閘鬆開後剛性要大,不能往下掉一點再返回去。
三、係統構成:
如圖1所以,機械手係統由三套伺服器和伺服電機組成,分別為(wei) X、Y和Z軸,控製板卡上有三路脈衝(chong) +方向輸出,可以單獨對X、Y和Z軸進行控製。其中Z軸處於(yu) 垂直位置,為(wei) 防止掉電在重力作用下掉下來,需要使用帶抱閘的電機。

圖1、機械手
四、係統工作原理:
伺服驅動器工作在位置模式,以X軸為(wei) 例,係統原理圖如下圖所示。通過脈衝(chong) 控製卡的脈衝(chong) 輸出來控製伺服電機,方向信號控製電機的運轉方向。 Y軸Z軸與(yu) X軸控製原理相同。
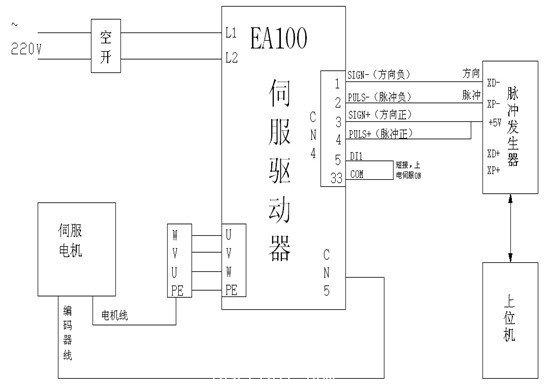
圖2、 係統原理圖
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們