




基本介紹
近20年來,隨著生產(chan) 線自動化水平日益提升,各種產(chan) 業(ye) 機械手得到了廣泛應用。機械手可以模仿人類手臂的某些動作功能,用以按照固定程序抓取、搬運對象或操作工具。而其中電氣可編程控製技術與(yu) 氣動技術相結合,使整個(ge) 係統自動化程度更高,控製方式更靈活、 性能更加可靠。它可代替人的繁重勞動以實現生產(chan) 的機械化和自動化,具有結構簡單、重量輕、動作迅速、平穩可靠、節能環保等優(you) 點被廣泛應用於(yu) 機械製造、冶金、電子、輕工、食品、醫藥和原子能等行業(ye) 。
設備介紹
氣動機械手的種類很多,有多種分類方式,一般多按照所采用的坐標形式來分類,可分為(wei) 直角坐標式、圓柱坐標式、極坐標式。機械手的手部又分為(wei) 夾鉗式、吸附式、磁吸式等較為(wei) 經常使用。
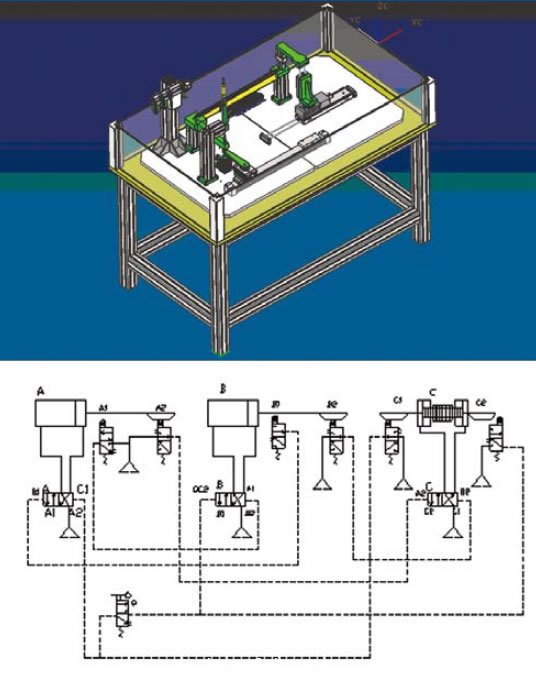
以我們(men) 設計的夾鉗式氣動機械手為(wei) 例,它由三個(ge) 氣缸組成(橫臂的距離固定),根據設計要求選型為(wei) :夾爪氣缸A(YSC型號:YMHQG-20D)其活塞杆退回時夾緊工件,活塞杆伸出時鬆開工件。立柱升降缸B(YSC型號: YCXSM20-50)。立柱回轉缸C(YSC型號:YMSQ20-RS2-SH2),該氣缸有2個(ge) 活塞,分別裝在帶齒條的活塞杆兩(liang) 頭,齒條的往複運動帶動立柱上的齒輪旋轉,從(cong) 而實現立柱的回轉,同時可以通過調節螺栓調節回轉的角度。橫向搬運氣缸D(YSC型號:YCXSW20-200)實現機械手橫向搬運對象的距離,控製部分選用2位5通雙電控的電磁閥(YSC:YSY5240-5E)。
設備示意圖
應用規劃及效果
整套設備充分體(ti) 現了YSC氣動產(chan) 品在自動化應用中的高穩定、高持久、高精度等特性,是自動化流水線上的理想選擇。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們