




概述
雙電機驅動消隙係統可以有效地克服度機械傳(chuan) 動鏈帶來的傳(chuan) 動間隙誤差,由於(yu) 傳(chuan) 動機構機械加工誤差和機械磨損的存在,由電機至受控對象的傳(chuan) 動間隙造成的誤差已無法忽視,為(wei) 此,人們(men) 采用消隙齒輪、自動予緊機構等辦法消除這種誤差,這些辦法可以有效地消除傳(chuan) 動間隙的靜態誤差,但在高精度快速隨動係統中,電機驅動負載進行頻繁換向,即使采用機械消隙措施,由於(yu) 間隙造成的瞬態誤差仍難以克服。雙電機消隙驅動係統利用兩(liang) 套響應頻帶很寬的伺服電機係統構成聯動係統,使係統在動態消除傳(chuan) 動間隙的同時實現高速響應的隨動控製,從(cong) 而提高機床動靜態傳(chuan) 動精度。
雙電機驅動消隙係統原理
用兩(liang) 台伺服電機分別驅動兩(liang) 個(ge) 初級齒輪,電機與(yu) 初級齒輪為(wei) 直接連軸,無傳(chuan) 動間隙,由初級齒輪至輸出齒輪的各級齒輪的傳(chuan) 動間隙之和簡化為(wei) 如圖的單級傳(chuan) 動的間隙。消隙係統在伺服運行過程中,采用對兩(liang) 台伺服電機進行聯動控製,使各級齒輪始終保持單麵貼合,從(cong) 而精確地傳(chuan) 遞扭矩、速度或位移。並且在保證無間隙傳(chuan) 動的同時,具有良好的伺服精度和快速響應特性。如圖1所示。
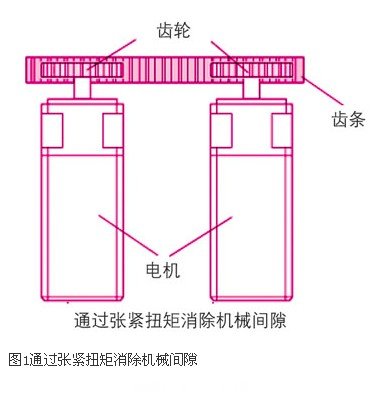
當伺服電機向一個(ge) 方向旋轉時,係統是單方向輸出扭矩,傳(chuan) 動係統的扭矩傳(chuan) 遞方向不變,所以並不存在間隙問題。隻有在伺服電機反向旋轉時,係統變換扭矩傳(chuan) 遞方向,間隙問題才凸顯出來。實際消隙控製是在伺服電機反向時係統扭矩輸出為(wei) 零的區域附近對兩(liang) 個(ge) 電機施加一個(ge) 足以克服間隙的張緊力(扭矩偏置),使得這一力矩範圍內(nei) 兩(liang) 個(ge) 伺服電機實施消隙驅動,而越過這個(ge) 區域後,兩(liang) 個(ge) 伺服電機則協同出力。
實現雙電機驅動消隙的方法
雙電機驅動消隙就是用西門子數控係統具有的主從(cong) 控製功能實現的,主從(cong) 控製就是主動軸和從(cong) 動軸速度設定點的耦合,包括用於(yu) 均衡扭矩分配的扭矩補償(chang) 控製器。
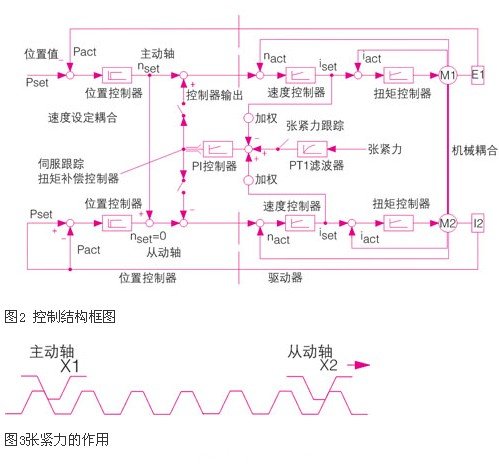
在西門子數控係統主從(cong) 控製功能中,兩(liang) 個(ge) 伺服電機(主和從(cong) )在機械上是連接在一起的,並且隻需一個(ge) 位置編碼器做位置控製。有位置編碼器的伺服電機作為(wei) 主動軸,從(cong) 動軸隻有速度控製沒有位置控製,從(cong) 動軸的速度值與(yu) 主動軸的速度設定值一致,兩(liang) 個(ge) 軸的速度控製器保持獨立。設定主從(cong) 耦合,從(cong) 動軸就以主動軸的速度設定移動,從(cong) 動軸隻有速度控製沒有位置控製。主動軸和從(cong) 動軸執行無位置偏差的控製,扭矩補償(chang) 控製器把扭矩均勻分布在主動軸和從(cong) 動軸上,用附加扭矩在主動軸和從(cong) 動軸之間產(chan) 生張緊力。圖2為(wei) 控製結構框圖。
通過張緊力控製在主動軸和從(cong) 動軸上外加方向相反的扭矩,使其始終處在保持張力的狀態。通過這一功能,通過齒輪來減小主動軸和從(cong) 動軸的反向間隙造成的影響。但是,這並不意味著可減小機械係統本身存在的滾珠絲(si) 杠和工作台之間的反向間隙。如圖3所示,即使在靜止狀態張緊力產(chan) 生的扭矩相互牽引使主動軸x1和從(cong) 動軸x2驅動的齒輪反向間隙減少。
主從(cong) 配置隻在從(cong) 動軸中進行配置。在默認的設定中,與(yu) 速度設定耦合一樣,主動軸也用扭矩補償(chang) 控製。
下麵以我公司生產(chan) 的xk2130型數控龍門鏜銑床為(wei) 例說明具體(ti) 應用。
我公司生產(chan) 的xk2130型數控龍門鏜銑床工作台移動(x1軸)采用了雙電機消隙控製機構。其中x1為(wei) 主動軸,lb382c光柵尺作為(wei) 位置反饋,全閉環控製;x2為(wei) 從(cong) 動軸,電機編碼器位置反饋,半閉環控製。參數設置如下:
md 37250:ms_assign_master_speed_cmd[ax2]=1 ax2與(yu) ax1速度耦合
md 37252:ms_assign_master_torque_ctr[ax2]=0 ax1扭矩分配與(yu) 速度耦合一致
md 37262:ms_coupling_always_active[ax2]=1 ax2與(yu) ax1永久耦合
md 37254:ms_torque_ctrl_mode[ax2]=0 扭矩分配ax2與(yu) ax1雙向加入
md 37268:ms_torque_weight_slave[ax2]=50 扭矩分配ax2與(yu) ax1 50%
md 37256:ms_torque_ctrl_p_gain[ax2]=0.5 扭矩補償(chang) 控製器增益
md 37258:ms_torque_ctrl_i_time[ax2]=5.0 扭矩補償(chang) 控製器積分時間
調試中需要注意的事項
選擇的張緊扭矩必須足夠大以保證即使在加速期間所產(chan) 生的扭矩也不低於(yu) 要求的最小張力,切勿設定一個(ge) 超過額定扭矩的值,設定值過大會(hui) 發出過載報警。為(wei) 防止電機過熱,可以在電機靜止時減少張緊扭矩。調試中通過調整md 37264:ms_tension_torque,使機床運行平穩無振動。
結論
用西門子數控係統具有的主從(cong) 控製功能實現雙電機驅動消隙,不僅(jin) 可以有效地消除傳(chuan) 動間隙的靜態誤差,同時實現高速響應的隨動控製,從(cong) 而提高機床動靜態傳(chuan) 動精度。雙電機驅動消隙功能的應用降低了設計成本,簡化了機械傳(chuan) 動結構,方便了車間裝配調試,因此具有廣泛的應用前景。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們