




1 引言
絕對值位置控製係統對於(yu) 經常使用的點位控製係統來說,是一種非常方便實用的位置控製方式。一旦原點設置後,完畢每次停電後開機時,這種係統不需要回原點,大大方便了操作。三菱mr-j2s-a係列的伺服係統和三菱fx2n係列plc是在實際中經常用到的伺服係統和控製器,本文討論在某些特殊的應用場合,如何應用它們(men) 來構建一個(ge) 絕對值位置控製係統。
2 控製任務簡介
這是一個(ge) 實際使用的控製任務,參見圖1示意。a點是設備的原始位置,b點是設備的工作位置。開始工作後,設備以位置控製方式移到工作位置b,然後,設備從(cong) b以速度控製方式點向a點移動。在移動過程中,執行一些其他的任務,當這些任務完成後在a與(yu) b之間的任一位置c點停止。然後以位置控製方式回到原始位置a點,這樣整個(ge) 工作循環結束。
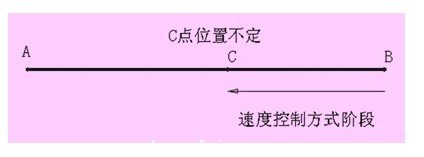
圖1 控製任務
2.1 控製平台
三菱j2s-a係列的伺服係統和三菱fx2n係列plc的功能和特性:三菱mr-j2s-a係列的伺服係統中伺服電機的編碼器為(wei) 每轉為(wei) 131072線的絕對值編碼器,伺服驅動器能夠在停電情況下記住伺服電機的當前位置。該伺服係統有位置控製、速度控製和轉矩控製三種運行方式。同時該伺服係統內(nei) 置絕對位置專(zhuan) 用傳(chuan) 輸協議,如果菱mr-j2s-a係列的伺服係統工作在位置方式,則可配合fx2n係列plc的dabs(讀絕對位置)指令,在伺服驅動器通電後伺服on(son信號)有效時,plc中讀出伺服電機的當前位置。但僅(jin) 在son信號接通時的上升沿開始傳(chuan) 輸當前伺服電機位置一次,在son信號接通以後將不再傳(chuan) 輸伺服電機的當前絕對位置。伺服電機的當前絕對位置由位置控製裝置(如fx2n-1pg模塊)根據發出的脈衝(chong) 數來確定。這實際上是一個(ge) 開環控製係統。在不發生報警或者脈衝(chong) 傳(chuan) 輸不受到幹擾的情況下,整個(ge) 位置控製係統的位置將不會(hui) 丟(diu) 失。如果工作在速度控製方式則不能在son接通時讀取伺服電機的絕對位置,在整個(ge) 工作過程中,也無法確定取伺服電機的絕對位置。圖2是典型的位置控製係統配置圖。
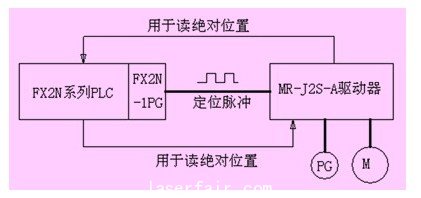
圖2 係統配置
2.2 任務分析
在本任務中,伺服驅動器將工作在位置控製和速度控製兩(liang) 種方式。a點和b點的定位操作,要求控製係統必需記住伺服電機的位置,但由於(yu) b點與(yu) c點之間的速度運行方式,使得傳(chuan) 統的控製係統不能獲知伺服電機的位置。因為(wei) 盡管在位置方式位置控製器能確定伺服電機的位置,但在伺服驅動器從(cong) 位置方式轉變為(wei) 速度方式後,位置控製器將不起作用,所以也無法確定伺服電機的位置。由於(yu) 在整個(ge) 控製過程中,既有位置控製方式,又有速度控製方式,所以典型的傳(chuan) 統控製配置將不能滿足本控製任務,必須采用一種新的控製方式來實現控製。#p#分頁標題#e#
3 控製方案的硬件配置
上述問題的基本解決(jue) 思路是通過plc與(yu) 伺服驅動器的通訊方式,來實時讀取伺服電機的當前實際位置,這樣不管伺服係統處於(yu) 位置控製方式,還是在速度控製方式,控製係統都能知道伺服電機的當前位置,從(cong) 而使係統能正確地定位在a點和b點。通過查閱資料,我們(men) 了解到三菱j2s係列伺服係統除了內(nei) 置絕對位置專(zhuan) 用傳(chuan) 輸協議外,還內(nei) 置了三菱伺服通訊協議;三菱fx2n係列內(nei) 置了無協議通訊指令(rs指令),所以我們(men) 可使用rs指令根據伺服驅動器的通訊協議來讀取電機當前位置。圖3是控製係統框圖。
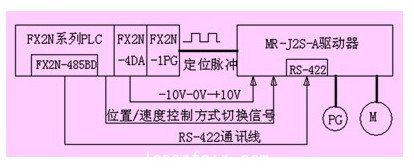
圖3 係統框圖
在圖3中,fx2n係列plc為(wei) 主控製器,擴展特殊模塊fx2n-1pg為(wei) 定位模塊,其輸出為(wei) 頻率和脈衝(chong) 數可控的定位脈衝(chong) 。當plc主係統通過通訊方式獲得伺服電機當前位置的前提下,能在定位指令的驅動下,驅動伺服電機到給定位置;擴展特殊模塊fx2n-4da模擬量輸出模塊,其輸出為(wei) 0到正負10v的電壓信號;fx2n-485bd為(wei) 485通訊卡,它和mr-j2s-a伺服驅動器的rs-422相連;fx2n主機通過485bd-rs422口與(yu) 伺服驅動器進行通信,讀取伺服電機的當前絕對位置。當處於(yu) 位置控製方式時,電機由fx2n-1pg定位模塊發出的定位脈衝(chong) 來控製,包括其運轉速度和目標位置。當位置/速度切換信號有效時,伺服驅動器切換為(wei) 速度控製方式,由模擬量模塊輸出的0到正負10v來控製其速度大小和運動方向。安裝在plc主機上的485通訊卡與(yu) 伺服驅動器上rs-422口進行通訊,隨時讀取伺服電機的當前絕對位置值。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們