




1 引言
近年來,隨著我國自動化技術的迅速發展,工業(ye) 自動化取得了長足的進步。變頻器由於(yu) 性能穩定、節能環保、性價(jia) 比高,在工業(ye) 各個(ge) 領域得到了廣泛的應用。其中,冶金、造紙等行業(ye) 對電氣控製係統的轉速和轉矩的動靜態指標有著較高的要求,在轉爐或紙機的電氣控製上要求各部分驅動電機轉矩或轉速嚴(yan) 格同步,否則,無法維持正常生產(chan) ,產(chan) 品質量難以保證。然而,在實際生產(chan) 中,有許多因素都會(hui) 幹擾電機的同步控製,例如電網電壓的波動、頻率的變化、負載的突變、溫度的改變等。因此,為(wei) 了得到理想的同步控製效果,采用主從(cong) 控製是比較好的解決(jue) 方案之一。
2 同步運行方案的選擇
工業(ye) 中同一台設備或者同一條生產(chan) 線的各個(ge) 運動部分通常采用一台大功率電機或多台相對功率較小的電機分別拖動的方式,而這些不同的運動部分彼此間在運動速度、轉矩等參數方麵常常有配合協調關(guan) 係,這就要求在各電動機的調速控製之間建立某種關(guan) 係,這就是所謂的同步運行問題。
同步運行是變頻調速在工業(ye) 應用中比較複雜和要求很高的領域。正確選擇同步控製方案,是在同步運行領域正確設計變頻調速係統的關(guan) 鍵因素。通常,同步運行主要可以采用以下三種方式實現。
2.1 單台大功率電機
對於(yu) 大功率負載,一般選用一台大功率電機及相應功率的變頻器組成其傳(chuan) 動係統。相對於(yu) 多電機電氣傳(chuan) 動係統,單台大功率電機傳(chuan) 動係統由於(yu) 隻有一個(ge) 傳(chuan) 動速度,同步性能最優(you) 。然而,也正是由於(yu) 該係統的唯一性,任何一個(ge) 設備發生故障都將導致整個(ge) 係統的停機,係統冗餘(yu) 性差,而且由於(yu) 電機、變頻器等電氣設備的功率較大,維護困難,恢複時間較長。
2.2 群拖
用一台變頻器帶動多台電動機同步運行的方式,稱為(wei) 群拖。這時變頻器的輸出側(ce) 就成了供電母線,各電動機接受同頻率同幅值的電壓。在電動機規格相同時,彼此間總是運行在理想空載轉速相同、斜率也大致相同的機械特性上,當負載大致一致時,實際轉速也大致相同。
由於(yu) 矢量控製和直接轉矩控製都不能用於(yu) 群拖方式,因此,群拖方式隻能采用恒壓頻比控製方式。由於(yu) 恒壓頻比控製方式的穩態和動態調速性能都不高,且低速時帶載能力差,起動轉矩低,一般應用於(yu) 調速性能要求不高的場合。另外,群拖方式下,各電動機隻是理想空載轉速一致,而實際轉速由機械特性曲線和負載力矩決(jue) 定,因此,群拖方式下的各個(ge) 電機轉速並不能保證完全一致,同步性不高,故群拖方式隻能用於(yu) 同步運行要求不高的場合。
2.3 主從(cong) 控製#p#分頁標題#e#
2.3.1 主從(cong) 控製連接方式
主從(cong) 控製是為(wei) 多電機傳(chuan) 動係統設計,每台電機分別由單獨的變頻器控製,因此,主從(cong) 控製可以采用具有轉矩控製能力的矢量控製和直接轉矩控製方法。利用這個(ge) 高性能的控製算法,可在同步運行的機構之間建立合理的負載分配關(guan) 係,充分發揮各電動機的轉矩輸出能力。主從(cong) 控製連接方式一般有以下兩(liang) 種:
(1)主機和從(cong) 機的電機軸通過齒輪、鏈條等進行剛性連接,如圖1(a)所示。從(cong) 機采用轉矩控製模式,以使傳(chuan) 動單元之間平均分配負載轉矩,此時是由機械結構保證轉速同步,由於(yu) 每台電機分別由單獨的變頻器控製,保證了各電動機承擔的負載分配合理,防止出現分配轉矩嚴(yan) 重不平衡,甚至彼此頂牛現象的發生。
(2)當主機和從(cong) 機的電機軸采用柔性連接時,如圖1(b)所示。從(cong) 機應該采用速度控製方式,在這種情況下,機械結構已經不能保證同步運行的要求,由變頻器組成的傳(chuan) 動係統除了采用速度控製方式解決(jue) 轉速同步問題,同時還要利用轉矩下垂特性實現負載轉矩在各個(ge) 電機上的平均分配。
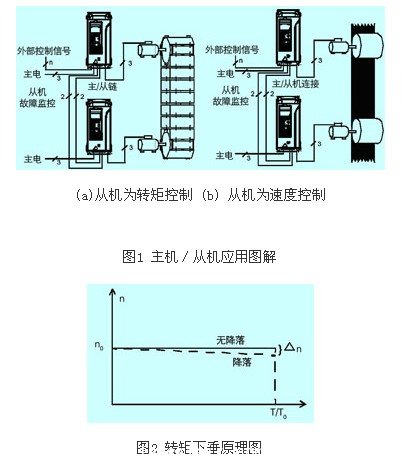
圖2示出了轉矩下垂功能原理:用參數規定額定負載轉矩下的轉速差,而係統根據實際轉矩和給定轉速決(jue) 定實際的速度給定值,如式(1)所示。這樣,係統根據轉矩情況自動調整給定轉速,具備了速度適應能力。因此,轉矩下垂特性允許主機和從(cong) 機之間存在微小的速度差。
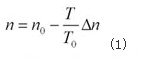
式中,n為(wei) 實際給定轉速,n0為(wei) 給定轉速,δn為(wei) 轉速差,t為(wei) 實際轉矩,t0為(wei) 額定轉矩。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們