




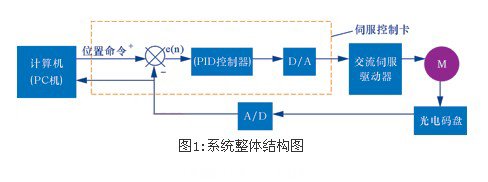
係統組成原理
該係統由四部分組成,即微機、伺服控製卡、交流伺服調速係統、傳(chuan) 感檢測。主控微機與(yu) 控製卡相連,可以通過數據線發送位置或速度命令,設定pid調節參數,並進行數模(d/a)轉換,該模擬信號經過交流伺服放大器放大後驅動伺服電動機。電機軸端裝有增量式光電碼盤,通過光電碼盤提供反饋信號(a、b、in脈衝(chong) )來完成位置伺服係統的位置反饋,組成一個(ge) 半閉環係統。一般將光電碼盤裝在電機非負載軸的軸端上,便於(yu) 安裝和避免機械部件振動和變形對位置控製係統產(chan) 生不利影響。位置反饋環中傳(chuan) 感元件—增量式光電編碼器將運動構件實時的位移(或轉角)變化量以a、b相差分脈衝(chong) 形式長線傳(chuan) 輸到現場控製站(pc機)中進行編碼器脈衝(chong) 計數,以獲得數字化位置信息,主控微機機算給定位置與(yu) 實際位置(即反饋到的位置)的偏差後,根據偏差範圍采取相應的pid控製策略,將數字控製作用經數模轉換變成模擬控製電壓,並輸出給伺服放大器,最終調節電機運動,完成期望值的定位。
伺服控製方法
工業(ye) 控製中常用的方法是pid調節器,盡管隨著現代交流調速技術的發展,出現了各種新型控製算法,如自適應控製、專(zhuan) 家係統、智能控製等。從(cong) 理論分析,許多控製策略都能實現良好的電機動靜態特性,但是由於(yu) 算法本身的複雜性,而且對係統進行模擬辨識比較麻煩,因此,在實際係統中實現時困難,對於(yu) 傳(chuan) 統的pid調節器而言,其最大的優(you) 點在於(yu) 算法簡單,參數易於(yu) 整定,具有較強的魯棒性,而且適應性強,可靠性高,這些特點使pid控製器在工業(ye) 控製領域得到廣泛的應用。對於(yu) 數控係統中的控製對象而言並不複雜,用pid調節器更易實現預期效果。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們