




0、引言
工業(ye) 管道係統已經被廣泛應於(yu) 化工、石油及城市水暖供應等領域,焊縫質量是一種重要的工業(ye) 管道內(nei) 部潛在缺陷,它的好壞是管道運輸安全、可靠和使用壽命的一個(ge) 決(jue) 定性因素。
在國外一些發達國家,管道檢測機器人已經誕生並投入使用,但是進口設備昂貴,並且維護費用高,需要培訓才能正確使用。在我國,這方麵的研究工作起步較晚。目前國內(nei) 還沒有成型的、商品化的產(chan) 品問世,故該項目的研發可以向產(chan) 業(ye) 化方向發展,加強工業(ye) 管道的檢測和管理。
機器人在管道外麵沿著固定的軌跡移動,操作者通過外部的監視器監視機器人運行情況。當監視器屏幕顯示焊縫時,操作者控製機器人點進和點退以準確定位焊縫。人工操作定位準確率較高,但效率低。為(wei) 了提高管道焊縫檢測機器人的自動化程度,本文采用了一種基於(yu) DSP的管道焊縫檢測機器人係統,設計了一套焊縫檢測機器人係統,可將機器人可靠、準確、快速地牽引至焊縫處,從(cong) 而完成焊縫自動定位任務。由於(yu) 該機器人可在X和Y方向移動,所以當發現焊縫時還可以多視角觀察焊縫,以確定焊縫的大小和形狀。
機器人外形如圖1所示:
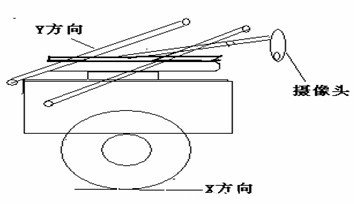
圖1 機器人外形圖
1、管道焊縫檢測機器人係統的工作原理
管道焊縫檢測機器人由移動小車、CCD圖像采集係統、圖像采集卡、驅動設備和控製係統等部分組成。其中移動小車是檢測和控製部分的專(zhuan) 業(ye) 平台,所有的檢測與(yu) 控製裝置都是由小車裝載。
係統工作原理:將機器人放入外部管道的固定軌道上,通過計算機發出指令讓機器人在管道中以一定速度運行,這時驅動在機器人軸線上的CCD傳(chuan) 感器采集信號與(yu) 現有計算機中存儲(chu) 的缺陷信號匹配時,計算機發出指令將此時的圖像記錄下來,並傳(chuan) 到人機界麵,利用已編製的軟件給出缺陷的位置和圖像。這樣運行下去,直到計算機發出停止命令為(wei) 止。工作原理如圖2所示:
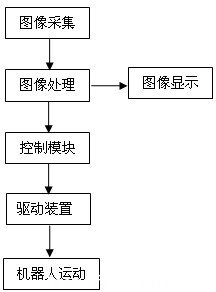
圖2 機器人工作原理圖
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們