




隨著自動化設備對控製的高精度、高響應性需求的不斷增加,自動化控製技術不斷提高,精確的高速定位控製得到廣泛應用,plc這一工業(ye) 控製產(chan) 品也從(cong) 早期的邏輯控製領域不斷擴展到運動控製領域,實現了以往plc無法完成的運動控製功能。
在運動控製中大多數采用大家熟悉的數控係統或者是計算機運動板卡來完成,雖然作為(wei) 專(zhuan) 門的產(chan) 品能夠實現複雜的運動軌跡控製,但同時要完成一些邏輯動作的控製就不如plc靈活方便。台達dvp20pm係列plc高速定位、雙軸線性及圓弧插補多功能可編程控製器,結合了plc邏輯動作控製和數控係統運動控製的各自優(you) 點,在功能上滿足雙軸插補的高速定位需求。
台達運動控製型plc硬件結構
dvp20pm是台達運動控製型plc。dvp20pm通過前後兩(liang) 個(ge) 擴展口既可作為(wei) plc主機執行也可作為(wei) eh2型主機的擴展模塊使用,具有x0-x7、y0-y7數字量輸入輸出各八點,並配置了手搖輪、零點信號、原點信號、極限信號、啟動、停止等各種信號接口滿足應用需求。
dvp20pm主機包含64k超大程序容量內(nei) 存(flash),可支持100段運動程序,脈衝(chong) 輸出最高可達500khz,並具備電子原點返回模式,支持plc順序語言及定位語言(g碼與(yu) m碼),下麵先由硬件部分簡單介紹20pm 組成。
電源
dvp20pm電源規格參見附表。
i/o點規格
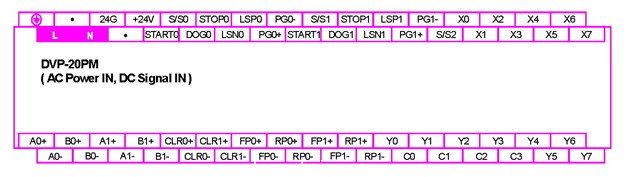
參見圖1,dvp20pm提供的數字量輸入輸出點規格與(yu) 台達通用plc規格基本相同,輸入點支持sink(漏極)和source(源極)兩(liang) 種方式,輸出點也有繼電器輸出和晶體(ti) 管輸出可選。
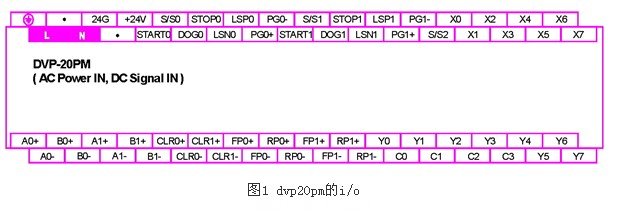
需要提到的是其在運動控製中的特殊輸入輸出點,簡述如下:
start0、start1:啟動輸入;
stop0、stop1:停止輸入;
lsp0/lsn0、lsp1/lsn1:右極限輸入/左極限輸入;#p#分頁標題#e#
a0+、a0-、a1+、a1-:手搖輪a相脈波輸入+,-(差動信號輸入);
b0+、b0-、b1+、b1-:手搖輪b相脈波輸入+,-(差動信號輸入);
pg0+、pg0-、pg1+、pg1-:零點訊號輸入+,- (差動信號輸入);
dog0、dog1:原點回歸的近點信號輸入或多段運動的啟動信號;
clr0+、clr0-、clr1+、clr1-:清除信號(servo驅動器內(nei) 部偏差計數器清除信號);
fp0+、fp0-、fp1+、fp1-:脈衝(chong) 輸出端口;
rp0+、rp0-、rp1+、rp1-:脈衝(chong) 輸出端口。
(注:0表示第一軸,1表示第二軸,如start0表示啟動第一軸,start1表示啟動第二軸,其他信號依次類推)
從(cong) 端子分布可以看到,除了常用的極限和啟動停止信號外,配置了過零脈衝(chong) pg和手搖輪功能輸入端,手搖輪是機床應用中常用而必備功能,而利用過零信號在精確控製場合往往會(hui) 用到,當然更不用說定位控製中都會(hui) 用到的dog原點信號。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們