




自然界的魚蟲飛鳥等生靈,對於(yu) 機器人開發者來說,都是最好的老師。據The Verge報道,德國一家名為(wei) Festo的公司模擬自然界中袋鼠的跳躍,設計製造了名作BionicKangaroo仿生袋鼠機器人——它擁有發達的後肢、前傾(qing) 的身軀和一條用以平衡身體(ti) 的長尾,神似一隻在草原奔跑的袋鼠。
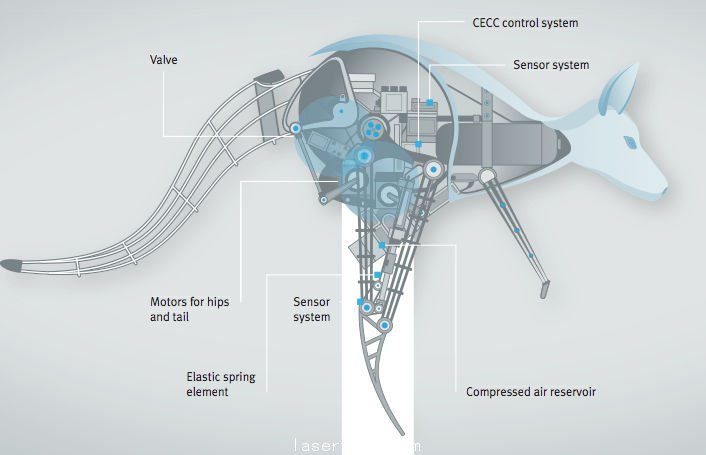
與(yu) 袋鼠的運動原理相似,在機器袋鼠的後腿中,又有一塊“肌腱”,用以推動袋鼠向前跳躍,同時又在落地的瞬間,集聚勢能。機器人本身由氣動係統控製,通過落地時的作用力壓縮空氣存儲(chu) 能量在“肌腱”中,釋放能量的同時模擬袋鼠向後蹬地的動作。在空中的時候,後腿會(hui) 像前移,準備著地時能得到最大的受力,而後部的尾巴用來控製袋鼠身體(ti) 的平衡。
這隻仿生袋鼠的重量約為(wei) 7千克,站立起來的高度為(wei) 1米。它最高能跳至40厘米,活動半徑最遠為(wei) 80厘米。從(cong) 視頻中可以看出,BionicKangaroo在跳動的時候看起來還很笨拙。而用來控製這隻袋鼠身姿,是由Thalmic labs出品的MYO臂環,這種臂環還可以用來控製小型飛行器,以及虛擬現實設備Oculus中的動作控製。在袋鼠背部安置著傳(chuan) 感器,它負責把每次的運動和能量數據傳(chuan) 輸給研發人員。
仿生袋鼠是Festo仿生學習(xi) 網絡最新的實驗作品,這項演示試圖為(wei) 現有的自動化機械,尋找新的改進方案。目前,仿生技術不止局限於(yu) 機器人領域,它也被用在PingWest曾經報道過的模擬神經元的計算機芯片,與(yu) 模擬母親(qin) 子宮為(wei) 早產(chan) 兒(er) 設計的智能床墊設備中。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們