




焊接機器人作為(wei) 現代製造業(ye) 的主體(ti) 裝備成員,在工業(ye) 生產(chan) 現場得到了廣泛的應用。然而,由於(yu) 受關(guan) 節自由度和作業(ye) 可達空間的限製,單一的通用焊接機器人所能完成的焊接任務是十分有限的,所以在麵對複雜焊接任務的生產(chan) 環節,比如汽車底盤和車身的生產(chan) ,就不得不用大量的焊接機器人來協同完成,於(yu) 是我們(men) 就看到數十台甚至上百台焊接機器人同時工作在同一生產(chan) 線上的壯觀場麵。其實,這既是工業(ye) 生產(chan) 現代化的寫(xie) 照,也是單一焊接機器人能力局限的結果。
焊接機器人技術的發展,從(cong) 宏觀上講大體(ti) 是兩(liang) 個(ge) 方向。一是從(cong) 焊接過程的質量控製,比如提高焊縫跟蹤軌跡精度等,從(cong) 焊接工藝的角度來提高焊接質量。二是焊接機器人作業(ye) 能力的拓展,變位機就屬於(yu) 這一類。本質上變位機是焊接機器人關(guan) 節自由度的拓展和作業(ye) 空間的延伸。變位機的應用使得單台焊接機器人的作業(ye) 靈活性更強,焊接工件的尺寸理論上也不再受限於(yu) 機器人自身的作業(ye) 空間。變位機的出現很大程度上彌補了過去焊接作業(ye) 中的種種局限性。可以說,變位機已經成為(wei) 焊接機器人突破自身局限的新支點。毫無疑問,變位機成功應用的關(guan) 鍵是與(yu) 焊接機器人的協調控製,通俗地講,就是兩(liang) 者之間的有效配合。
變位機係統的基本組成和國內(nei) 生產(chan) 基本狀況
長期以來,由於(yu) 製造業(ye) 發展水平的差異和相關(guan) 研究的薄弱,迄今沒有專(zhuan) 門著作去研究焊接變位機的定義(yi) 和分類,因此對其的稱謂和功能分類也各有不同。為(wei) 此,我們(men) 需要賦予焊接變位機一個(ge) 專(zhuan) 業(ye) 的定義(yi) ,即用來拖動待焊工件,使其待焊焊縫運動至理想位置進行施焊作業(ye) 的設備。具體(ti) 而言,焊接變位機可以通過回轉變位或直線變位運動,使加載工件的任意方位待焊焊縫,根據具體(ti) 焊接需要,快速變為(wei) 船腳焊、平焊成平角焊的施焊作業(ye) ,從(cong) 而改變了可能需要立焊、仰焊等難以保證焊接質量的施焊作業(ye) 。
現在我國生產(chan) 變位機的廠家不少,大都不成規模,基本都是作為(wei) 焊接輔機,和焊接機器人配套生產(chan) ,以變位機為(wei) 主導產(chan) 品的企業(ye) 尚未形成。國產(chan) 變位機按運動功能主要分全雙回轉式、傾(qing) 翻-回轉式、單回轉式變位機。其中全雙回轉式包括L、H(雙座)、C型雙回轉式;而單回轉式焊接變位機主要包括:雙座單回轉式、雙座單回轉尾架移動式、單座單回轉等三種類型。變位機的基本性能要求包括承載量、定位精度、最大扭矩輸出、調速範圍、以及精準角度設置等,目前重型變位機承載量可在5000Kg以上,最大扭矩輸出可達18000KN,焊接旋轉角可以在0-360°之間任意順、逆時針設定。高精度變位機一般采用步進電機或伺服電機控製,其本體(ti) 精度保證依賴於(yu) 步進電機驅動器,而與(yu) 機器人主體(ti) 部分協調配合好壞是焊接係統工作精度高低的決(jue) 定因素。
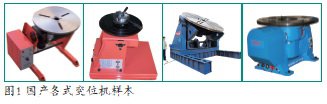
生產(chan) 焊接變位機的主要國內(nei) 廠家有濟南焊達機械有限公司、無錫市陽通機械設備有限公司、杭州凱爾達機器人有限公司、威達自動化焊接設備公司等單位,其生產(chan) 的變位機在國內(nei) 占有較大的市場。
焊接機器人和變位機協調運動控製係統設技
作為(wei) 焊接機器人和變位機的協調運動控製的解決(jue) 方案,我們(men) 通常會(hui) 將變位機和機器人作為(wei) 一個(ge) 整體(ti) ,采用一個(ge) 具有協調控製功能的控製係統來統一控製,這是一種行之有效的開發方法。然而,不少企業(ye) 因為(wei) 之前配置了大量焊接機器人,將原有的單機器人係統改造成具有與(yu) 獨立變位機協調運動的作業(ye) 係統,就成為(wei) 了企業(ye) 的現實需求。因此前述的設計方法對於(yu) 改造早期的封閉式單機器人應用係統並不適用,能否設計一種方法解決(jue) 二者之間的協調問題,成為(wei) 當今焊接機器人研究的熱點。
1. 針對焊接機器人和變位機整機係統的運動控製設計
將焊接機器人和變位機視為(wei) 整機係統開發出配套的專(zhuan) 用控製器,可以提高設計效率,獲得較好的協同作業(ye) 效果。在幾家研究單位中,浙江大學機器人研究中心長期致力於(yu) 工業(ye) 機器人領域通用運動控製器的設計研發,目前已開發出第三代多軸運動控製器MAMC 3.0,其基於(yu) DSP和CPLD的開放式架構可以滿足通用型焊接機器人多軸聯動的控製場合,並且控製器擴展出的接口可用於(yu) 變位機伺服控製。該產(chan) 品將計劃產(chan) 業(ye) 推廣。其硬件架構如圖2所示。

在這套控製係統中,由工控機負責統一協調規劃,完成任務的分配和調度。運動控製由焊接機器人和變位電機的下層伺服驅動器、光電編碼器構成位置閉環來實現。係統工作的狀態將會(hui) 通過運動控製器反饋,實時顯示在工控機顯示界麵上。得益於(yu) 開放式的軟硬件架構,操作者可以方便的通過更改相關(guan) 程序實現不同的配置策略,如具體(ti) 控製軸數、軌跡規劃策略以及運動控製策略等。目前,諸多科研單位對焊接機器人係統運動控製做了深入研究並得出一係列重要成果,如果從(cong) 開始階段就實現基於(yu) 開放式架構的集成化控製係統,無疑是給這些研究成果創造了一個(ge) 方便轉化的平台。通過這種集成化的專(zhuan) 業(ye) 控製係統,可以在焊接初始時期預先規劃好焊接機器人和變位機的運動軌跡,使得在作業(ye) 工程中實現二者良好的配合。
目前,具有機器人自動焊接係統生產(chan) 資質的國內(nei) 廠家大多采取該設計方案。以杭州凱爾達機器人有限公司生產(chan) 的焊接機器人係統為(wei) 例,其變位機控製和焊接機器人本體(ti) 是由同一個(ge) 控製係統實現控製。目前該公司研製有單軸變位機和雙軸變位機,並應用與(yu) 工件邊焊接邊變位,可適應環焊縫,複雜空間焊縫的要求。
2.針對焊接機器人和變位機獨立的運動控製器設計
對於(yu) 已購置成品工業(ye) 機器人的企業(ye) ,由於(yu) 是封閉式的控製係統,除非購置同樣廠家的變位機,否則很難和其他廠家的變位機實現統一控製。因此,客觀上需要我們(men) 去采用獨立式控製方法,分別控製焊接機器人本體(ti) 和變位機的運動。為(wei) 保證焊接精度的要求,必須要將焊接機器人和變位機的相對位置精度限定在一個(ge) 極小的範圍內(nei) 。硬件架構如圖4所示。
 #p#分頁標題#e#
#p#分頁標題#e#
針對這種設計目標的一般方法是:焊接加工前,通過焊接機器人內(nei) 建的注信息功能創建和保存運動類型和變位機速度,並在變位機控製器上另建文件保存與(yu) 焊接機器人對應的變位機位置信息,然後在加工前按照上述的控製方法生成焊接機器人和變位機的加工文件。執行焊接工作時,分別由機器人和變位機控製器解析執行。這種設計方法的基礎在於(yu) 求解工件焊接軌跡在用戶坐標係下的位置。在焊接前,先要建立用戶坐標係,確定變位機相對於(yu) 焊接機器人的位置,然後求得焊縫軌跡在該坐標係下的表達式,最後確定變位機運動控製函數,並由機器人和變位機的運動關(guan) 係求得機器人的空間運動軌跡。因為(wei) 焊接機器人和變位機采用的是兩(liang) 套不同的控製係統,要保證協同作業(ye) 還需要統一的時鍾觸發,這點應該在硬件係統控製中予以實現,如統一這兩(liang) 個(ge) 係統的指令信號時鍾,實現同步觸發。此外,在示教過程中,示教文件和加工文件的文件結構設計亦不容輕視。
除了變位機運動控製算法的建立,變位機運動軌跡的圓滑度和機器人配合運動的複雜度也同樣重要。為(wei) 使變位機運動保持運動的平穩性,需要利用高級插值算法對變位機示教點做擬合,實現圓滑過渡。另外可以采用小線段擬合的方法,這樣可以將機器人空間運動軌跡分割成一個(ge) 個(ge) 小的線段。這樣就大大減少了焊機器人所需的控製點數,有利於(yu) 實現二者協同工作。
國內(nei) 在對分離式變位機的相關(guan) 研究直到近期才逐漸開始,高性能的變位機目前還不普及,大多數現場應用的變位機隻能實現簡單的、基本的預設動作,複雜焊接軌跡的協調運動還未在大規模工業(ye) 加工場合中實現。
總結和展望
在我國,變位機是個(ge) 相對“年輕”的產(chan) 品,它對焊接工業(ye) 來說是不可或缺的,以焊接機器人為(wei) 核心,集成變位機等設備的焊接加工係統大大提高了我國工業(ye) 製造的效率。同時,這種集成性設備的關(guan) 鍵技術,也是進一步提高我國焊接裝備製造以及焊接加工工藝水平所必須突破的。在這些技術當中,焊接機器人本體(ti) 和變位機協調控製技術具有突出的應用價(jia) 值,它使需要立焊、仰焊等難以保證焊接質量的施焊操作成為(wei) 可能,從(cong) 而保證了焊接質量,提高了焊接生產(chan) 率和生產(chan) 過程的安全性。
在未來的焊接機器人係統發展中,變位機協調控製技術的實現和普及需要廣大科研單位和製造企業(ye) 共同推動,其必將成為(wei) 中國焊接機器人係統發展的新支點。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們