




-
機器人發展綜述——從遠程機器人到網絡機器人(三)
4.對應用的展望 從(cong) 上麵列舉(ju) 的連接在 Internet的機器人例子來看,像在房間裏散步、在美術館裏欣賞等都隻限於(yu) 娛樂(le) 的應用範圍。當然這也是有希望的領域。這裏我想展望包括娛樂(le) 在內(nei) 的網絡機...
2011-09-29 -
機器人發展綜述——從遠程機器人到網絡機器人(二)
3.網絡上的機器人群 現在,幾個(ge) 機器人連到 Internet上,通過網來實現動作。或許當時在USC的 Ken Goldberg們(men) 開發的探寶機器人可以說是世界上最早運用的例子。該係統采用HTML來使Puma動作,用探頭...
2011-09-29 -
機器人發展綜述——從遠程機器人到網絡機器人(一)
1.前言 自萬(wan) 維網 (WWW)問世以來,整個(ge) 世界進入了網絡時代。而機器人領域一 直在研究遠程機器人,若將它與(yu) 網絡聯結,是否可開拓網絡機器人領域。本文就遠程機器人向網絡機器人發展所需...
2011-09-29 -
機器人技術及應用
一、技術概述 工業(ye) 機器人由操作機(機械本體(ti) )、控製器、伺服驅動係統和檢測傳(chuan) 感裝置構成,是一種仿人操作、自動控製、可重複編程、能在三維空間完成各種作業(ye) 的機電一體(ti) 化自動化生產(chan) ...
2011-09-28 -
運動控製卡在數控衝床係統方麵的成功應用
1、概述 作為(wei) 基於(yu) PC機的上位控製單元,運動控製卡在專(zhuan) 機係統的開發過程中,具有更大的靈活性和開放性。使得用戶能在短期內(nei) 開發出功能強大的運動控製係統。正因為(wei) 以上的特點,專(zhuan) 業(ye) 運動...
2011-09-28 -
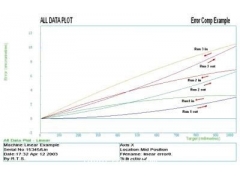
基於激光幹涉儀的數控機床定位係統(三)
8、花瓣形 圖3所示的誤差隨時間和間隔不斷增加使線出現花瓣形。導致花瓣形的可能原因有:(1)在材料 溫度傳(chuan) 感器 定位不正確或者膨脹係數不正確。(2)滾珠絲(si) 杠在測試期間溫度進步、機床溫度...
2011-09-21 -
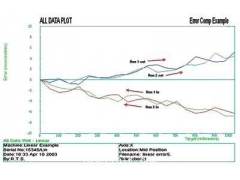
基於激光幹涉儀的數控機床定位係統(二)
5、燕尾狀 圖1為(wei) 在往程測試中出現向下的坡度的情況,回程測試為(wei) 往程測試的鏡像,往程和回程測試之間的偏差(或滯後或反向間隙)隨軸線離開受驅動端而逐漸進步。產(chan) 生燕尾狀的可能原因主要...
2011-09-21 -
基於激光幹涉儀的數控機床定位係統(一)
數控機床在運行過程中,其定位精度會(hui) 產(chan) 生一定誤差,正確地運用 激光 幹涉儀(yi) ,並進行全麵科學地分析,可有效進步數控機床的定位精度。 隨著數控機床應用的普及,采用激光幹涉儀(yi) 對數控...
2011-09-21


 排行榜
排行榜
 編輯推薦
編輯推薦





 關注我們
關注我們