




L4級自動駕駛就能解放人類?
未必。
不久前,全球31家自動駕駛公司接到了同一支科研團隊的通知:
你們(men) 的L4,有重大缺陷。
缺陷集中在多傳(chuan) 感器融合方案,3D打印的路障,能騙過9成以上的激光雷達和ADS係統。
所謂多傳(chuan) 感器融合,其實融合了個(ge) 寂寞。
主流L4方案,幾乎無一幸免。

這麽(me) 嚴(yan) 重的自動駕駛算法漏洞,是由中美聯合團隊發現,其中既有高校研究者,也有來自英偉(wei) 達、百度、嬴徹科技的產(chan) 業(ye) 界大咖。
相關(guan) 論文,不久前入選計算機安全頂會(hui) IEEE S&P 2021。
1 L4識別障礙物失敗率超九成
問題就出在了融合方案上。
在自動駕駛係統裏,實時「感知」周圍物體(ti) ,是所有重要駕駛決(jue) 策的最基本前提。感知模塊負責實時檢測路上的障礙物,比如:周圍車輛,行人,交通錐 (雪糕筒)等等,
目前各個(ge) 公司研製的高級別(L4)無人車係統,普遍采用多傳(chuan) 感器融合的設計,即融合不同的感知源,比如激光雷達(LiDAR)和攝像頭(camera),從(cong) 而實現準確並且高冗餘(yu) 的感知。
這樣的設計,前安全冗餘(yu) 的出發點是各個(ge) 感知源不被同時攻擊,所以總是存在一種可能的多傳(chuan) 感器融合算法,依靠未被攻擊的傳(chuan) 感器來確保安全。
這個(ge) 基本的安全設計假設在一般情況下是成立的,然而研究團隊發現,出了實驗室,在現實世界中,這種多傳(chuan) 感器融合的障礙物感知存在漏洞。
同時攻擊不同的感知源,或者攻擊單個(ge) 感知源,都能使無人車無法識別障礙物並直接撞上去。
為(wei) 了評估這一漏洞的嚴(yan) 重性,團隊設計了MSF-ADV攻擊,它可以在給定的基於(yu) 多傳(chuan) 感器融合的無人車感知算法中自動生成上述的惡意3D障礙。
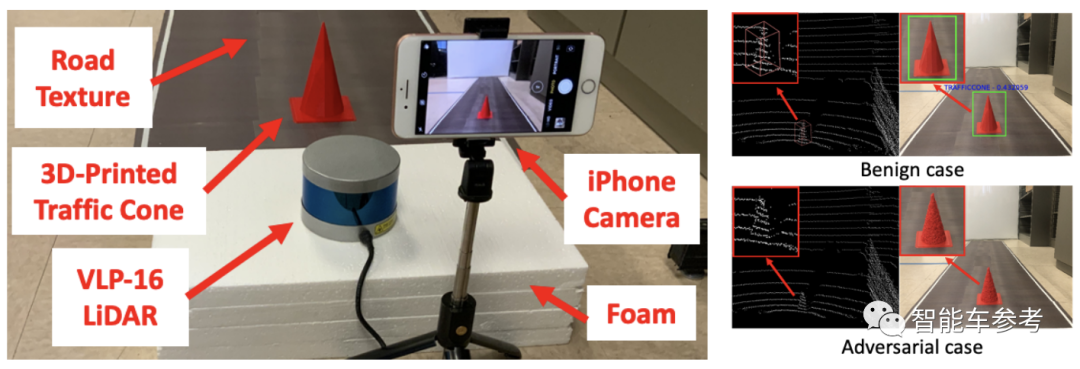
這個(ge) 係統的特點是有效性、魯棒性、隱蔽性,以及能在現實中實現。
測試結果顯示,在不同的障礙物類型和多傳(chuan) 感器融合算法中,攻擊實現了>=91%的成功率。
同時團隊還發現,係統生成的惡意3D障礙物,從(cong) 駕駛者的角度看是隱蔽的,完全模擬現實情況;此外,對不同的被攻擊車的位置和角度都有效,平均成功率>95%。
L4算法的失敗率超過九成,還敢用嗎?
2 為(wei) 什麽(me) 嚴(yan) 重?
實驗室裏把L4係統“折磨”的焦頭爛額,有什麽(me) 實際意義(yi) ?
當然有了。
研究團隊設計實驗的一個(ge) 基本出發點就是能在現實世界中複現,實際上,團隊也這麽(me) 做了。
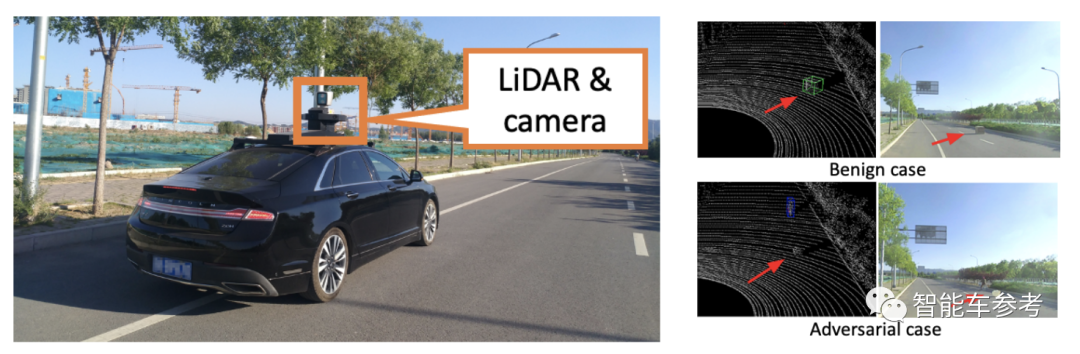
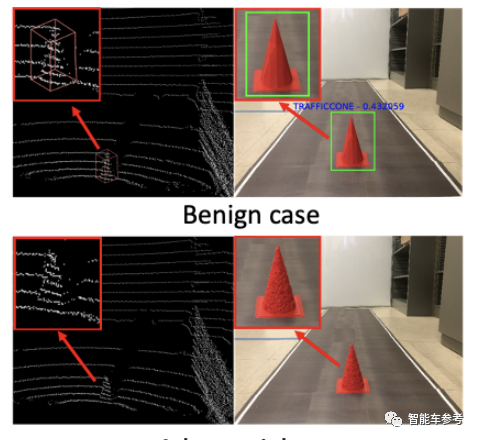
在安裝了激光雷達和攝像頭的實車測試中,係統對於(yu) 3D打印、表麵經過處理的交通錐識別失敗率高達99.1%。
這種狀況的原因是人為(wei) 處理的惡意障礙物,對於(yu) 物體(ti) 表麵做了特殊處理,雷達回波信號發生了變化,係統無法識別。
而所謂多冗餘(yu) 的視覺係統,也沒能做出補救。
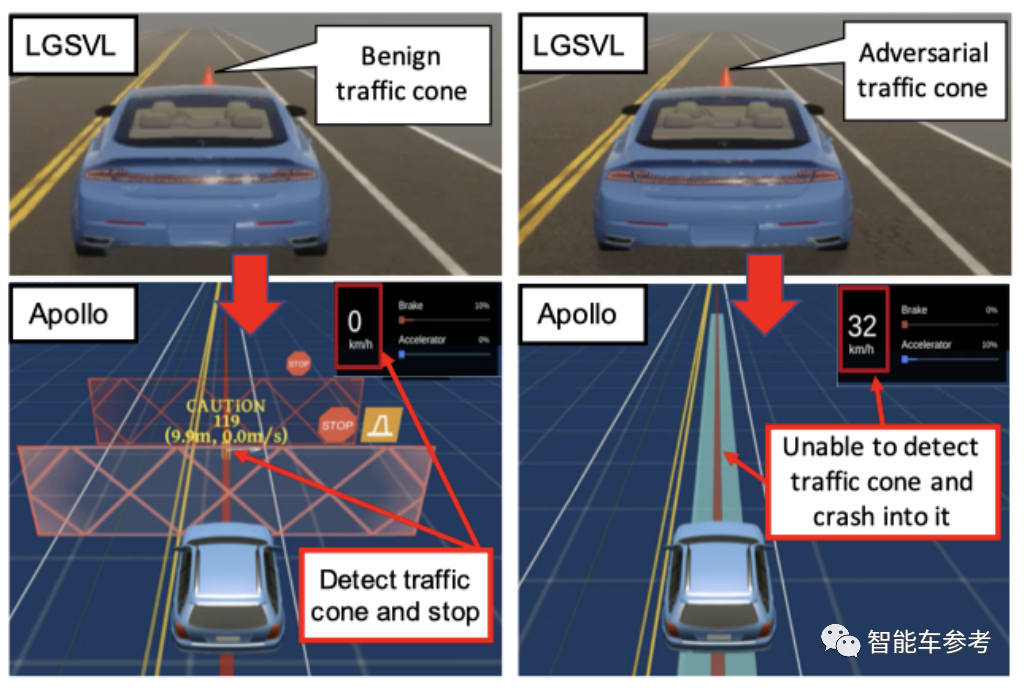
另外,在對百度Apollo自動駕駛的測試中,出現了100%識別失敗的情況。
這個(ge) 漏洞帶來的危害和隱患是巨大的。首先因為(wei) 它很容易在物理世界中實現和部署。
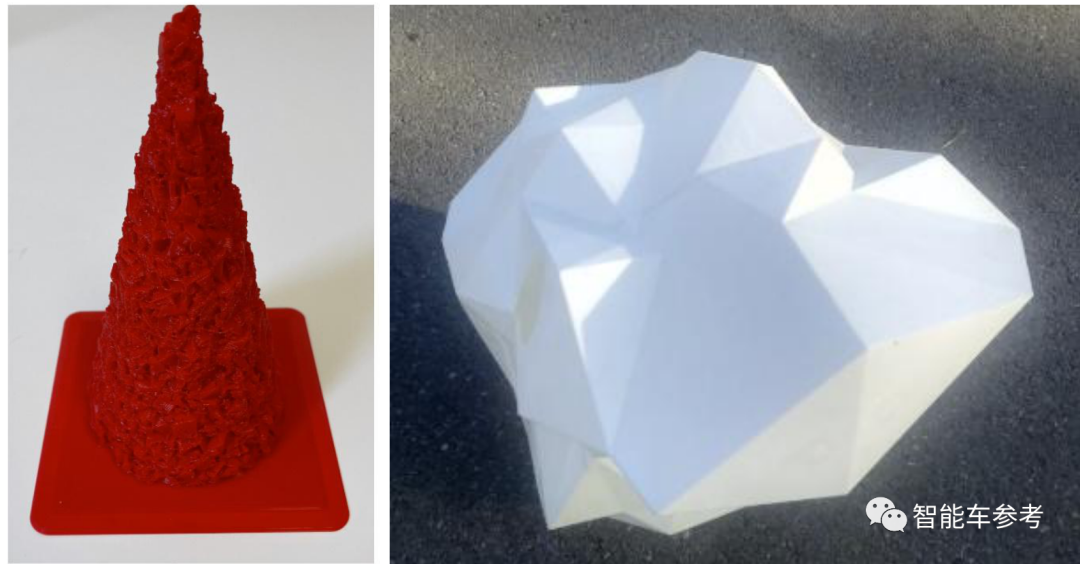
攻擊者可以利用3D建模構建這類障礙物,並進行3D打印。目前市麵上有很多在線3D打印服務,甚至不需要購置3D打印設備。
其次它可以高仿合法出現在道路上的障礙物,比如交通錐。而攻擊者可以在物體(ti) 中填充水泥、金屬等等,重量輕鬆超過100公斤,高度迷惑、又能造成嚴(yan) 重的碰撞後果。

另外,攻擊者還可以利用道路障礙物的功能設計一種僅(jin) 針對無人車的攻擊:將釘子或玻璃碎片放在生成的惡意障礙物後麵,這樣,人類駕駛員能夠正常識別交通錐並繞行,而無人車則會(hui) 忽視交通錐然後爆胎。
在這種情況下,惡意的障礙物體(ti) 可以像普通交通錐體(ti) 一樣小而輕,以使其更容易3D打印、攜帶和部署。
3 多感知融合不是萬(wan) 全之策
這項研究的主要價(jia) 值在於(yu) 讓大家意識到多傳(chuan) 感器融合感知同樣存在安全問題。
自動駕駛研發團隊一直把多傳(chuan) 感器融合作為(wei) 對抗單個(ge) 傳(chuan) 感器攻擊的有效防禦手段,但這篇文章證明傳(chuan) 感器“堆料”不能從(cong) 根本上防禦對自動駕駛係統的攻擊。
一般車上都有的緊急刹車係統可以防禦這種攻擊嗎?
可以減少風險,但不能完全防止。
自動駕駛係統的存在意義(yi) ,就在於(yu) 自行處理盡可能多的安全隱患,而不是依賴緊急刹車係統。
緊急刹車係統永遠也不應該用來代替自動駕駛本身的功能。
所以唯一的方法是自動駕駛供應商們(men) 要想辦法在係統層麵上解決(jue) 漏洞。
目前團隊已經聯係了31家自動駕駛公司,其中大部分都表示將對自家的產(chan) 品重新評估。
4 產(chan) 業(ye) 界學界聯合成果
本研究作者團隊,一共有9名研究人員。
其中,四位同等貢獻第一作者來自加州大學爾灣分校,密西根大學安娜堡分校,亞(ya) 利桑那州立大學和英偉(wei) 達Research。分別是Ningfei Wang, Yulong Cao, Chaowei Xiao和Dawei Yang。
三位教授分別是Qi Alfred Chen, Mingyan Liu, Bo Li
此外還有兩(liang) 位來自產(chan) 業(ye) 界的研究人員,分別是百度深度學習(xi) 技術與(yu) 應用研究和國家工程實驗室的Jin Fang和嬴徹科技CTO楊睿剛。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們