




蘋果最新的ipads pro上使用的新的激光雷達到底是什麽(me) ?和車載常說的雷達有什麽(me) 區別?和之前的3D TOF又有什麽(me) 區別呢?
首先這些雷達的使用的都是TOF技術,也就是time of fly通過測量光飛回的時間計算距離.不過這次的雷達和之前的車載雷達從(cong) 外觀和形式上並不一樣.反而和之前手機上使用在前攝的3D Tof一樣使用的平麵3D TOF.但是TOF算法和sensor原理上和車載雷達一樣使用的Dtof技術,而不是手機上3D TOF常見的Itof技術.
下麵本文分析蘋果新的激光雷達和之前的手機3D TOF還有車載雷達有什麽(me) 區別,有什麽(me) 技術突破.首先三者的結構實現和算法原理的區別可以參考下表:

從(cong) 物理結構上的區別
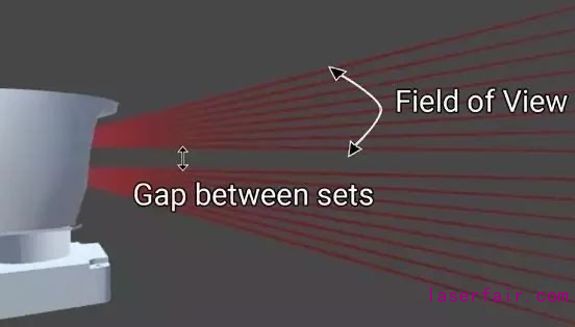
目前車載激光雷達,多是利用旋轉的線性掃描,有單線程或者多線程的.如下麵兩(liang) 張圖第一張圖是車載雷達單次掃描的示意,隻能掃描一些線.比如64線程雷達單次隻能獲得64個(ge) 點的深度.然後如第二張圖的結構上麵部分進行旋轉,每旋轉一定角度進行一次掃描,轉一圈得到360度的一幀3D圖像.這樣的物理結構導致車載雷達的幀率和價(jia) 格一直不理想.Velodyne的64線程的激光雷達價(jia) 格高達8W美金,這也從(cong) 一定程度上也限製了使用激光雷達的自動駕駛的發展.

而蘋果這次的雷達其實和之前使用3D TOF則更為(wei) 類似.在不討論sensor pixel和算法的原理上.他們(men) 都是通過一個(ge) 發射器和一個(ge) 接收器.而唯一不同的是之前的3D TOF都是使用Itof技術,蘋果這次使用的是Dtof技術.所以蘋果使用激光雷達的名字,個(ge) 人覺得更多的是博眼球的一種宣傳(chuan) 策略.

3D TOF成像
Itof和Dtof的區別
Itof和Dtof的區別,首先從(cong) 發出信號來看,Dtof是單個(ge) 脈衝(chong) ,Itof多是正弦波.

Itof和Dtof的區別
Itof和Dof在sensor和算法上的也有不小的區別. Itof目前更多是使用global shutter sensor 或者是在這個(ge) 基礎上改進的專(zhuan) 用sensor.以原始的global shutter sensor 為(wei) 例,最終的算法是使用基於(yu) 正弦波的相位計算, 一般需要使用四幀圖像才能通過相位得到距離,而這導致了sensor不得不工作在4倍於(yu) 3D成像的幀率,比如3D成像需要30fps,sensor就不得不工作在120fps.這導致了係統功耗的增加和幀率提升的困難.
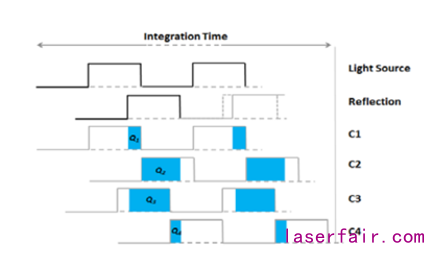
Itof的計算原理
而目前的Dtof則可以過雪崩二極管擺脫傳(chuan) 統脈衝(chong) tof計算需要使用兩(liang) 幀基於(yu) global shutter sensor圖像的束縛.SPAD的像素(SiPM)可以直接輸出脈衝(chong) 信號.通過像素的脈衝(chong) 輸出直接進行簡單的模數轉換就可以得到光子回來的時間和個(ge) 數,這大大增大了偵(zhen) 測距離,減少了功耗和運算量.
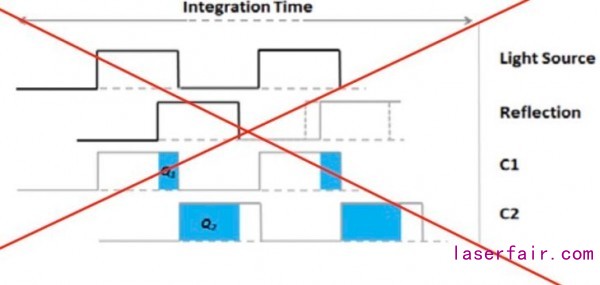
傳(chuan) 統脈衝(chong) TOF的計算原理
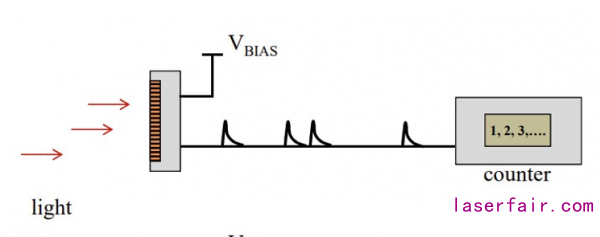
SPAD的簡化Singal Chain(該圖缺少轉換的TDC的器件,隻做示意,今後會(hui) 更詳細的介紹SPAD技術)
雪崩二極管
雪崩二極管是DTOF的關(guan) 鍵,其作用是通過在像素上增加
下圖左起第一個(ge) 是一般成像使用的PD(光電二極管),第二是APD(雪崩二極管),第三個(ge) 是SPAD(單光子雪崩二極管),其主要差別APD和SPAD在通過增加偏置電壓,在光子到光電二極管的時候會(hui) 產(chan) 生雪崩效應,就是產(chan) 生大量的電子.這對成像不利,但是對於(yu) 檢測脈衝(chong) 則很好.而SPAD比PAD更敏感,也就是隻需要很少的光子就能產(chan) 生雪崩效應.

其實Dtof並不是第一次在消費類設備上使用.最早在手機上是在後攝的激光對焦和蘋果Face id的測距使用的Dtof sensor.之前的限製主要是來自於(yu) SPAD的難以小型化導致sensor的的分辨率很難提高.而這次蘋果的激光雷達在這個(ge) 上麵是有所突破的,分辨率比之前設備上的Dtof都要高.

蘋果激光雷達參數的估計:
由於(yu) 目前蘋果還沒有公布具體(ti) 的參數,下麵參數是本公眾(zhong) 號不負責任的估計.待正式產(chan) 品參數出現後我們(men) 會(hui) 進一步更新.
蘋果公司有兩(liang) 家成像sensor的供應商都有能力實現SPAD的sensor :Sony和ST.從(cong) 目前已知的外網消息,這顆sensor應該是Sony的產(chan) 品.根據現在SPAD技術的發展,和之前蘋果3Dface id 的分辨率.以及從(cong) 目前得到產(chan) 品外觀中鏡頭麵積來估計蘋果這次的激光雷達分辨率應該能達到QVGA~VGA之間,最低也不會(hui) 小於(yu) QQVGA.單個(ge) pixel的size應該在10um到15um之間.從(cong) 理論上Dtof能到100m~300M的偵(zhen) 測距離,考慮到平板的使用場景和功耗的追求,這次的激光雷達應該可以達到5~10米左右的距離,是大於(yu) 之前手機上Itof 3米左右的有效距離.
前景展望
ITOF 和DTOF 比較
下表是Itof和Dtof的優(you) 缺點比較,從(cong) 表中可以看到,Dtof的優(you) 勢還是很明顯的,關(guan) 鍵參數上隻有分辨率略差,不過這次蘋果的使用的sensor上突破可能扭轉這個(ge) 局麵.

另外DTOF在實際工程化中需要的校準項也要比Itof少,實際生產(chan) 的難度更低.價(jia) 格比起車載雷達來說也更便宜,使用多個(ge) 3D tof也可以滿足自動駕駛的需求.個(ge) 人認為(wei) 蘋果使用的這種3D Dtof在各種場景中會(hui) 更有優(you) 勢,發展前途也更大.
(注:本文係微信公眾(zhong) 號《大話成像》,知乎專(zhuan) 欄《all in camera》原創文章,轉載請注明出處。 )
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們