




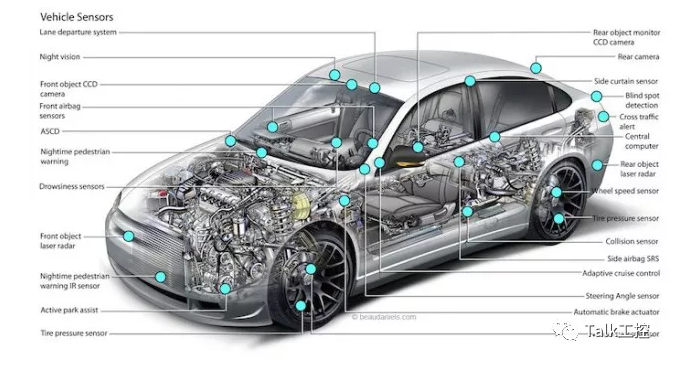
過去幾年,MEMS傳(chuan) 感器在強製安全係統中獲得了穩定的市場,如電子穩定控製係統和胎壓監測係統,這些係統在新款汽車中已經獲得普及。獲益的MEMS供應商包括陀螺儀(yi) 、壓力傳(chuan) 感器、加速度計以及前排和側(ce) 麵安全氣囊傳(chuan) 感器等。此外,汽車引擎應用的MEMS器件也正在穩定增長,主要來自於(yu) 日益增長的引擎管理和尾氣處理應用。
1、激光雷達
LiDAR係統使用的是旋轉激光束。寶馬、穀歌、日產(chan) 和蘋果的無人駕駛試驗車用的就是這項技術。但要想在量產(chan) 車上應用,價(jia) 格必須大幅下降。業(ye) 內(nei) 普遍認為(wei) ,再過幾年這個(ge) 目標就能實現。
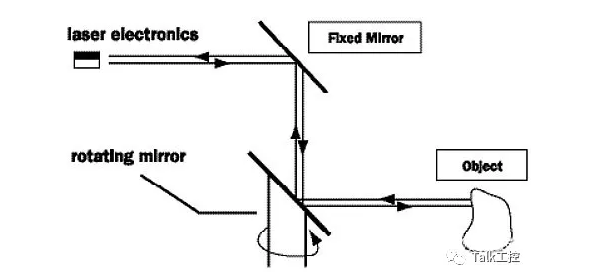

激光雷達工作原理
激光雷達的工作原理是通過發射和接收激光束來實現的。在其內(nei) 部,每一組組件都包含一個(ge) 發射單元與(yu) 接收單元。上圖使用了旋轉鏡麵的設計。
這套發射/接收組件和旋轉鏡麵結合在一起,能掃描至少一個(ge) 平麵。鏡麵不隻反射二極管發出去的光,而且也能把反射回來的光再反射給接收器。通過旋轉鏡麵,能夠實現 90到180度的視角,並且大大降低係統設計和製造的複雜度,因為(wei) 鏡麵是這裏麵唯一的運動機構。
脈衝(chong) 光以前被用於(yu) 探測距離。探測距離的原理是基於(yu) 光返回的時間,激光二極管發出脈衝(chong) 光,脈衝(chong) 光照射到目標物後反射一部分光回來,在二極管附近安裝一個(ge) 光子探測器,它可以探測出返回來的信號,通過計算發射和探測的時間差就可以計算出目標物的距離。脈衝(chong) 距離測量係統一旦被激活就能收集到大量的點雲(yun) 。
如果點雲(yun) 中有目標物,目標物就會(hui) 在點雲(yun) 中呈現出一個(ge) 陰影。通過這個(ge) 陰影可以測量出目標物的距離和大小。通過點雲(yun) 可以生成周圍環境的3D圖像。點雲(yun) 密度越高,圖像越清晰。
2、視覺圖像傳(chuan) 感器
現在一個(ge) 很廣泛的應用是將2D激光雷達與(yu) 視覺傳(chuan) 感器相結合,不過相比於(yu) 激光雷達,視覺傳(chuan) 感器低成本的特性,也讓其成為(wei) 了在自動駕駛解決(jue) 方案中不可或缺的存在。
通過視覺傳(chuan) 感器的圖像識別技術對周邊環境進行感知,對於(yu) 自動駕駛而言,除了知道在什麽(me) 位置存在什麽(me) 物體(ti) /行人之外,進而像車輛發出減速刹車等指令來避免事故這一功能之外,是以圖像識別為(wei) 基礎,能夠理解當前的駕駛場景,並學會(hui) 處理突發事件。
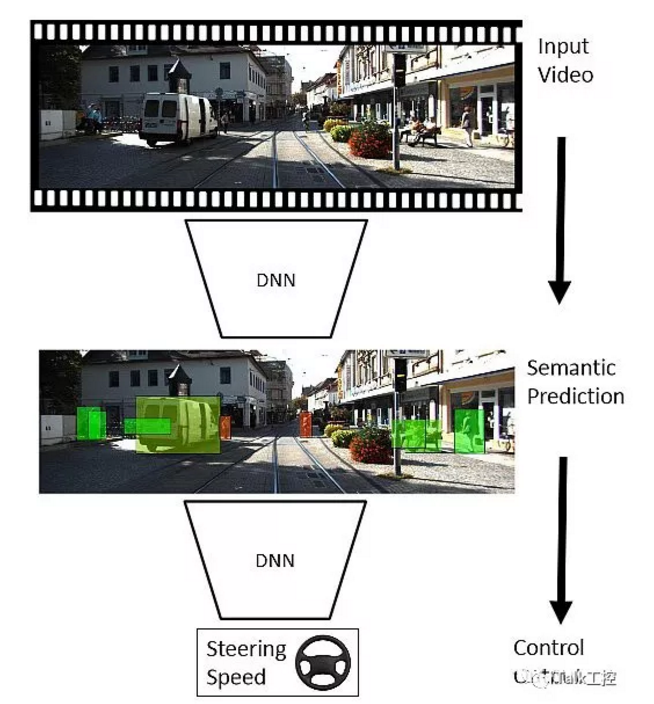
視覺傳(chuan) 感器工作流程如果說激光雷達的難度在於(yu) 如何讓其性能能夠滿足自動駕駛導航的需求,那麽(me) 攝像頭的難度則在於(yu) 從(cong) 感知拔高到認知的這一過程。
以人眼來進行類比的話,人類駕駛員在看到行人或車輛之後,會(hui) 基於(yu) 看到的景象對行人或車輛的下一步行動有個(ge) 預判,並根據預判來控製車輛。自動駕駛車同樣需要這個(ge) 「預判」的過程,而攝像頭就起到觀察的作用。自動駕駛汽車必須能夠對車內(nei) 人員、車外行人、車附近人們(men) 的行為(wei) 進行觀察、理解、建模、分析和預測。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們