




一直以來,是否采用激光雷達都是區分自動駕駛技術派係的「三八線」,相比 Waymo、Cruise 等中規中矩采用激光雷達方案的傳(chuan) 統派,馬斯克一直秉持著 AI 視覺方案+毫米波雷達取代激光雷達的思路。
這背後的核心原因在於(yu) 激光雷達有兩(liang) 大致命短板:
一是目前成本十分昂貴。二是在雨雪霧等極端天氣下精度會(hui) 下降的很厲害。
一般來說,一台自動駕駛汽車不隻需要一台激光雷達,才能導航並避開包括行人在內(nei) 的障礙物,之類傳(chuan) 感器不僅(jin) 塊頭大立在車頂影響美觀,而且目前價(jia) 格也處在 8,000 至 30,000 美元左右。
年初 CES 期間,大疆所收購的 Livox 公司一舉(ju) 推出 599 美元起步的激光雷達產(chan) 品線,讓市場頗為(wei) 激動。說到底,還是激光雷達太貴了!
撰文 | 力琴、吳昕
編輯 | 四月
近日,學術界傳(chuan) 來好消息,來自斯坦福大學工程學院的教授 Jelena Vuckovic 及其團隊提出了一種新方法——將車頂那顆難看又顯眼的「煙囪」縮小到單顆矽芯片上,並且以數百美元的價(jia) 格批量生產(chan) 。
如果這項成果被證明在商業(ye) 上可行,那麽(me) 它將有助於(yu) 開創自動駕駛汽車的新時代。
斯坦福大學工程學院教授 Jelena Vuckovic
Jelena Vuckovic 及其團隊的研究成果已經發表於(yu) 三月份《Nature》的子刊《Nature Photonics(自然 光子學)》,論文題為(wei) 《Inverse-designed non-reciprocal pulse router for chip-based LiDAR》(逆向設計的片上激光雷達非互易性脈衝(chong) 路由器)。
所謂激光雷達,實際上是「光檢測和測距」的簡寫(xie) ,在概念上與(yu) 雷達相同,隻是它使用光代替無線電波來「看到」人眼不可見的事物,根據光脈衝(chong) 向前發送和光束反射回探測器之間的延遲來測量汽車和物體(ti) 之間的距離。
與(yu) 雷達單元相比,激光雷達單元在檢測人和狗等生物方麵做得更好,但是雷達在穿透霧,煙霧,雨水和其他大氣異常方麵表現更好。

Vuckovic 教授的研究突破在於(yu) :研究人員使用一種稱為(wei) 逆向設計的過程,創建了一種強大的算法,該算法可以沿一個(ge) 方向向外發送一束紅外光,並測量反射回來需要多長時間。這些信息有助於(yu) 揭示光束路徑中的物體(ti) 。(補充背景:由於(yu) 矽對紅外線是透明的,就像玻璃對可見光是透明的一樣。)
換句話說,算法為(wei) 實際的光子電路繪製藍圖,光子電路執行特定的功能,將激光束發射到汽車前方,以定位道路上的物體(ti) ,並將反射光反射回探測器。
研究表明,這種以矽為(wei) 基礎的芯片級非互易器件的發展,可能會(hui) 為(wei) 光通信和激光雷達(光探測和測距)的應用帶來新的非線性器件和係統。
研究團隊認為(wei) 基於(yu) χ(3)的互易性器件從(cong) 根本上受到時間反轉對稱性和熱力學因素的限製,但它們(men) 的無源、無偏壓,簡單的體(ti) 係結構使其特別適合集成光子學,這對芯片級激光雷達具有特殊的意義(yi) 。
一
更小的激光雷達器件如何實現?
這項研究主要基於(yu) 矽基光電子技術,在上個(ge) 世紀 80 年代被提出了,並取得了一些成果。但是由於(yu) 矽的特性,使得矽基有源器件一直無法發展。直到 2004 年 Intel 公司在《nature》上發表矽基 MOS 結構的調製器,真正商業(ye) 化的矽光技術才開始發展,到目前,矽光技術也得到了迅速的發展。
Vuckovic 教授團隊的論文提到,諸如隔離器和循環器之類的非互易性器件是微波和光頻通信係統的關(guan) 鍵啟用技術,將非互易性器件小型化並提高其性能,能夠使其在光學通信、信號處理、光譜學和傳(chuan) 感領域的廣泛應用成為(wei) 可能。
盡管基於(yu) 電磁效應的非互易性器件可用於(yu) 自由空間和光纖通信係統,但它們(men) 的片上集成仍然具有挑戰性,主要是由於(yu) 伴隨著高插入損耗、弱磁光效應和材料不兼容的緣故。
而新的研究表明,χ(3)非線性器件消除了這種需求,可以在單片集成平台中實現無源、低損耗、無偏置的非互易傳(chuan) 輸,適用於(yu) 芯片級激光雷達的應用。
研究團隊在研究χ(3)非線性器件的同時,還利用逆設計研究了級聯 Fano Lorentzian 諧振器係統,在保持高傳(chuan) 輸率的同時增加非互易強度範圍。
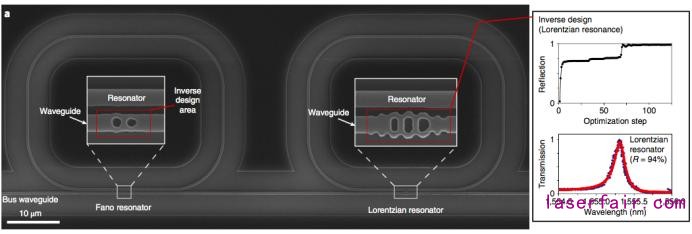
在絕緣體(ti) 矽平台上實現的級聯 Fano-Lorentzian 諧振器的 SEM 圖像
目前,絕大多數非線性非互易超表麵都基於(yu) Fano 諧振原理,依賴於(yu) 電磁波與(yu) 超表麵非對稱結構的諧振作用,原理簡單、實現成本較低。
研究團隊設置了兩(liang) 端口 Fano 諧振裝置,在諧振器耦合區域的波導中設計了一個(ge) 部分傳(chuan) 輸元件(PTE),以在響應函數中創建 Fano 線形。
雖然 PTE 的寄生損耗、固有的腔損耗會(hui) 嚴(yan) 重降低,但是反向設計使他們(men) 能夠通過 PTE 減輕額外的腔損耗,同時並行管理腔-波導的耦合強度。最後證明,Fano 諧振器所具有的尖銳的線形以及較低的固有損耗仍可以在中等功率水平上提供非互易性傳(chuan) 輸。
基於(yu) 級聯的非線性諧振,可在較寬的功率範圍內(nei) 工作。與(yu) 在任何輸入功率下工作的線性互易性器件不同,基於(yu) 單個(ge) 諧振器的非線性無源器件隻能在有限的信號功率(NRIR)範圍內(nei) 導致不可逆傳(chuan) 輸,而兩(liang) 個(ge) 諧振器級聯器件可以設計成打破 NRIR 內(nei) 任何功率值的單諧振器界限。
二
距離測量穩定性如何保證?
除此外,研究團隊還演示了非互易基於(yu) 傳(chuan) 輸和全光路由的光學測距測量,以確保測量的穩定性。
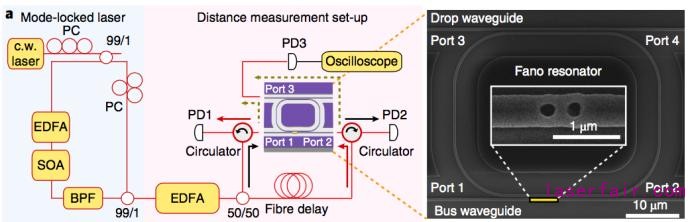
用於(yu) 光學測距的實驗原理圖
為(wei) 了產(chan) 生鎖模脈衝(chong) ,研究團隊使用光纖環形諧振器,該諧振器由光纖放大器、半導體(ti) 光放大器、偏振控製器和帶通濾波器組成。
鎖模是光學裏一種用於(yu) 產(chan) 生極短時間激光脈衝(chong) 的技術,脈衝(chong) 的長度通常在皮秒甚至飛秒。5 MHz 的脈衝(chong) 重複頻率允許測量距離長達 60 m,並且可以使用帶通濾波器將脈衝(chong) 的中心頻率調整為(wei) Fano 器件的工作範圍。
生成的脈衝(chong) 流由基於(yu) 光纖的耦合器分流,一部分脈衝(chong) 流直接發送到設備端口 1。另一部分脈衝(chong) 流首先通過光纖延遲線,然後發送到端口 2。鑒於(yu) Fano 諧振器所起的作用,耦合到端口 2 的脈衝(chong) 流不會(hui) 傳(chuan) 播到端口 1。
而來自端口 1 的脈衝(chong) 流傳(chuan) 輸到設備的端口 2。該設備將脈衝(chong) 流從(cong) 端口 2 到與(yu) Fano 諧振器耦合的另一個(ge) 波導中的端口 3。在此處與(yu) 來自端口 1 的輸入脈衝(chong) 流結合以生成雙脈衝(chong) 流的電信號跡線。
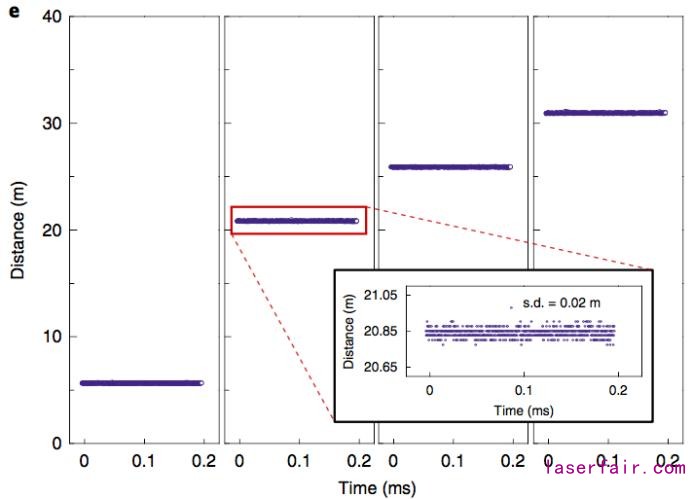
距離與(yu) 時間的關(guan) 係圖,其中時間增量是參考脈衝(chong) 周期,顯示距離測量的穩定性
研究通過測量距離跡線的放大視圖,證明了這種光學距離測量的穩定性。
研究表明,Fano 非互易發射器-路由器設備可以保護脈衝(chong) 激光源免受反射脈衝(chong) 流的影響,從(cong) 而使係統穩定運行,同時將來自這些反射脈衝(chong) 的光路由到另一個(ge) 波導。如果另一個(ge) Fano 諧振器串聯連接,且延時對應於(yu) 脈衝(chong) 寬度的一半,則即使在同時激發的情況下,反射脈衝(chong) 也可以被隔離。
基於(yu) 這些發現,研究團隊的實驗證明已實現的無源非對等發射機和路由器,在完全集成的芯片級激光雷達係統中作為(wei) 基本組件的可行性。
三
激光雷達能否大規模運用在無人駕駛汽車
當然,在芯片上建立這種測距機製,隻是製造廉價(jia) 激光雷達的第一步。研究人員表示,目前正在研究下一個(ge) 裏程碑,確保激光束可以旋轉而不使用昂貴的機械部件。
該研究的下一步是研製「單芯片激光雷達」,以擴大其覆蓋範圍,直到包括完整的 360 度圓角,而無需使用機械零件。
Vuckovic 預計,她的實驗室離建造一個(ge) 供道路測試使用的原型機還有大約三年的時間。「我們(men) 正朝著製造一個(ge) 激光雷達芯片的方向發展,這種芯片的價(jia) 格非常便宜,足以幫助為(wei) 自動汽車創造大眾(zhong) 市場。」
迄今為(wei) 止,馬斯克拒絕使用激光雷達,他說,一套攝像頭和雷達傳(chuan) 感器可以在沒有激光雷達限製的情況下做得更好。如果激光雷達的成本大幅下降,他可能會(hui) 改變自己的曲調。對於(yu) 完整的自我駕駛,似乎更多的信息總應該比少好。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們