




激光雷達作為(wei) 激光技術與(yu) 現代光電探測技術結合的先進探測方式,在自動駕駛汽車、無人機、智能機器人等領域有著廣泛的應用需求。為(wei) 了突破技術和器件的發展瓶頸,推動激光雷達技術取得長足進步,吉林大學電子科學與(yu) 工程學院矽基光電子研究團隊緊跟國內(nei) 外矽基光學相控陣激光雷達芯片的研究進展,致力於(yu) 在提升矽基光學相控陣芯片性能的道路上取得新突破,並開展基於(yu) 光學相控陣的調頻連續波遠距離測距工作,為(wei) 我國激光雷達領域的研究、開發與(yu) 應用提供基礎支撐。
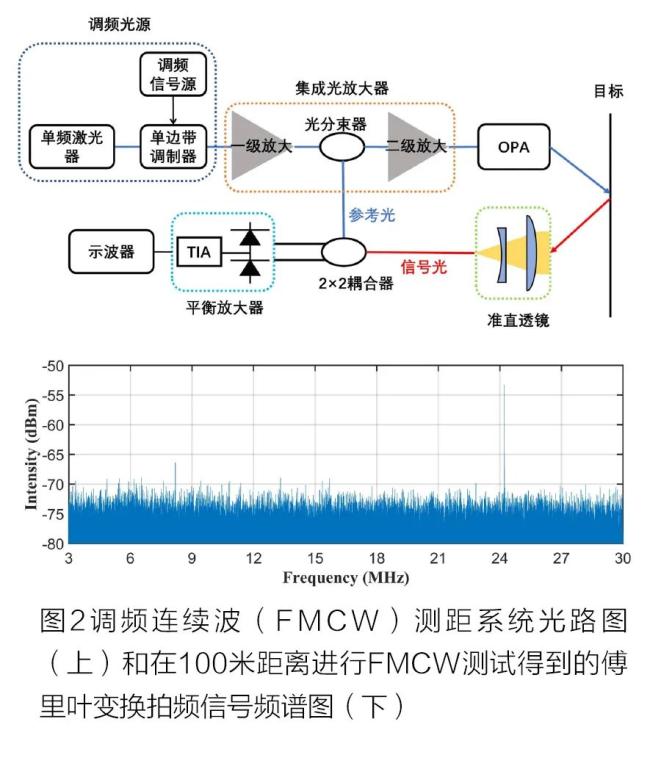
激光雷達是激光探測與(yu) 測距係統的簡稱,其通過激光來實現對探測目標的測距、測速等功能,主要由激光發射、光束掃描、激光接收和信號處理等模塊組成。與(yu) 傳(chuan) 統微波雷達的基礎原理類似,激光雷達通過探測發送和接收光信號的差異來計算目標的距離,從(cong) 而計算出精確的三維結構信息,得出目標的三維模型及相關(guan) 數據,生成三維點雲(yun) 圖,將真實世界的距離信息傳(chuan) 遞給計算機,使機器具有人類的深度視覺。與(yu) 傳(chuan) 統微波雷達相比,激光雷達不但具有波長短、波束發散角小、分辨率高、抗幹擾能力強等優(you) 勢,而且在功能相同的情況下體(ti) 積更小、重量更輕。 激光雷達的應用十分廣泛。例如,用於(yu) 智能交通,實現對車輛特征(如大小、速度、體(ti) 積)和流量的實時監測等;用於(yu) 自動駕駛汽車(智能網聯車),進行測距測速、避障導航等;用於(yu) 無人機,進行國土測繪、環境監測等;用於(yu) 數字城市,進行城市測繪、數字地圖構建;用於(yu) 智能機器人,進行精確定位、手勢識別等;用於(yu) 智能醫療,進行虛擬成像、三維打印等。當前,激光雷達市場總體(ti) 呈現高速發展態勢,尤其是應用於(yu) 自動駕駛汽車的車載激光雷達。另據分析公司預測,到2025年全球激光雷達市場規模將達到135.4億(yi) 美元,前景廣闊。 激光雷達技術方案簡述 激光雷達主要應用了激光測距的原理,可根據測距方式和二維光束轉向結構來劃分技術方案。其中,測距方式的選擇是決(jue) 定激光雷達性能上限的關(guan) 鍵。 測距方式包括使用光飛行時間差來直接測量距離的飛行時間(Time-of-Flight, ToF)方案,以及使用頻率差來間接測量距離的調頻連續波(Frequency Modulated Continuous Wave, FMCW)方案。ToF方案采用直接探測,對所有進入探測器的光都響應,易受環境光和其他激光雷達發出光波的幹擾;FMCW方案基於(yu) 相幹原理,將反射光和參考光的信號進行混頻,通過測量發送和接收的頻率差計算出目標的距離。 與(yu) ToF方案相比,FMCW方案的優(you) 勢在於(yu) :(1)由於(yu) 對頻率接近參考光的反射回波進行了有選擇性的探測,一般不受環境和其他附近激光雷達係統的幹擾;(2)基於(yu) 相幹原理,通過接收光的多普勒頻移可直接測量目標的速度,速度維數據的直接獲取降低了後端處理的算力需求;(3)測距具有高深度精度,並且僅(jin) 取決(jue) 於(yu) 啁啾帶寬和拍頻信號的信噪比,對接收端探測器的帶寬並無要求,而ToF方案的深度精度則受到探測器帶寬的限製;(4)FMCW係統能夠連續發射光子,探測遠距離所需的發射光功率更低,因此非常適用於(yu) 矽基光子集成芯片,這是因為(wei) 矽材料的非線性效應會(hui) 限製峰值功率,而ToF方案因為(wei) 需要探測脈衝(chong) 光的瞬時功率,所以對發射光功率有一定的要求。 激光雷達二維光束轉向結構可分為(wei) 機械式轉向和固態光束轉向。這裏以美國威力登公司在2007年推出的一款激光雷達為(wei) 例,簡要介紹傳(chuan) 統的機械式二維光束轉向方案:激光雷達的激光發射單元由多個(ge) 激光器垂直堆疊組成,整個(ge) 單元再通過伺服電機每秒數次旋轉將激光點變成線;發射係統和接收係統均通過機械轉動實現三維掃描並接收反射激光回波。這款雷達不但體(ti) 積龐大,還因為(wei) 存在高頻運動部件而常常存在耐久性不佳等問題,無法維持長時間穩定的高頻、高精度轉動。相比於(yu) 傳(chuan) 統的機械式激光雷達,固態激光雷達不含機械元件,能夠較好地克服上述問題,還能大幅降低成本、體(ti) 積和功耗。 全固態光學相控陣激光雷達 全固態激光雷達主要分為(wei) 微機械鏡(MEMS)、泛光(Flash)和光學相控陣(Optical Phased Array, OPA)3種類型(因為(wei) MEMS是在芯片上的微機械振動,所以也存在不將MEMS激光雷達歸為(wei) 全固態激光雷達的說法)。MEMS激光雷達的缺點主要是掃描角度較小、掃描精度難以控製,與(yu) 之相比,OPA激光雷達具有更大的掃描角度、更快的掃描速度和更高的掃描精度。泛光激光雷達的缺點主要是測量距離近(一般不到30米),與(yu) 之相比,OPA激光雷達具有更集中的激光能量和更遠的測量距離。此外,OPA可集成於(yu) 互補金屬氧化物半導體(ti) (CMOS)平台,形成光電互聯的片上係統。因此,OPA固態激光雷達被看作是“最有前途”的全固態激光雷達,將使機器具有更優(you) 異的視覺性能,可謂是幫助人類更便捷地探索三維世界的“智慧之眼”。 矽基OPA芯片是OPA固態激光雷達的核心。與(yu) 微波相控陣原理和結構相同,矽基OPA芯片的光波導陣列是在絕緣襯底上矽(SOI)之上製作的,通過控製相鄰光波導間的相位差來控製光束轉向。OPA的原理類似於(yu) 多縫衍射,多縫衍射在遠場形成的衍射圖樣是一係列的明暗條紋,而在某一位置是明紋還是暗紋,則取決(jue) 於(yu) 指向該點的平行光中光線之間的光程差。如果將OPA芯片的一根光波導天線類比為(wei) 一個(ge) 單縫,將光波導天線之間的間距類比為(wei) 單縫與(yu) 單縫之間的間距,那麽(me) OPA的遠場衍射圖樣就存在主極大和一係列的次極大,而這裏的主極大在OPA中被稱作主瓣。OPA激光雷達通過主瓣光束來實現測距測速,而OPA激光雷達的視場則取決(jue) 於(yu) 主瓣的轉向能力。 矽基OPA芯片主要包括光耦合器、級聯分束器、移相器和陣列天線。隻包含光波導陣列的一維OPA的遠場幹涉圖樣是一係列的豎條紋,在縱向上光束發散,能量無法聚焦。目前常見的二維掃描方案是將一維OPA與(yu) 陣列光柵天線進行結合,通過改變天線相位和輸入激光的波長來實現兩(liang) 個(ge) 方向的光束偏轉。相比於(yu) 二維OPA,該方案可以有效減少控製電極的數目,使芯片尺寸更為(wei) 緊湊,也降低了控製電路的複雜度。 從(cong) 目前來看,矽基OPA芯片的研究發展曆程可分為(wei) 3個(ge) 階段,分別是功能驗證階段、性能提升階段和係統光電集成階段。從(cong) 1997年美國加利福尼亞(ya) 大學的一維光束掃描到2009年比利時根特大學的二維光束掃描,這一曆程完成了對矽基OPA的空間光束二維轉向控製的功能驗證。之後的研究則主要集中於(yu) 性能提升,包括大視場、高分辨率、低功耗以及高光束出射能量。近年來,國外相關(guan) 研究機構報道的OPA規模已擴大至上千路,並開啟了激光光源、控製電路和光路的混合集成階段。在矽基OPA固態激光雷達產(chan) 品方麵,僅(jin) 有少數幾家國外公司製作出了樣機,而國內(nei) 總體(ti) 還處於(yu) 光路芯片的跟蹤探索階段,差距明顯。 矽基光學相控陣的發展瓶頸 激光雷達的核心指標主要包括橫縱向視場(發射光束橫向和縱向轉向範圍)、分辨率(分辨兩(liang) 個(ge) 物體(ti) 的最小角度間隔)、探測範圍(可探測的有效距離)以及成像幀率(每秒生成點雲(yun) 圖像的次數)。以車載應用為(wei) 例,激光雷達要能夠探測超過200米的遠距離物體(ti) 並形成點雲(yun) 圖像,而若想分辨遠距離的物體(ti) 則需要足夠的點雲(yun) 密度,這就要求發射端OPA芯片的出射光束要保持高分辨率、具有廣視場、能夠實現高速點對點掃描(用以滿足高幀率的要求)。從(cong) 國內(nei) 外OPA全固態激光雷達的發展來看,現有的OPA芯片主要存在以下5個(ge) 瓶頸: 其一,出射光束發散角大,無法滿足遠距離測距。光束發散角取決(jue) 於(yu) 光柵陣列天線的有效孔徑,有效孔徑越大,光束的發散角就越小,在空間傳(chuan) 播過程中光斑尺寸變大也就越不明顯。例如,發散角0.01°的光束在100米距離處的光斑尺寸僅(jin) 為(wei) 1.7厘米,在百米距離下也可以探測到較強的拍頻信號峰。因此,對於(yu) 自動駕駛等遠距離應用,小的發散角就顯得尤其重要。 其二,矽波導激光功率閾值低。絕大部分OPA芯片都采用由單一矽材料製成的納米光波導,而矽的材料特性使得激光損傷(shang) 閾值低,當高功率激光通過矽芯片時會(hui) 損壞芯片。因此,這些OPA芯片難以應用於(yu) 遠距離測距場景。 其三,大的橫向視場和小的發散角難以兼顧。橫向視場是指OPA通過調節天線相位差實現掃描的最大範圍,最大範圍則可定義(yi) 為(wei) 滿足主瓣光強度比背景噪聲強度高10倍這一條件的角度。在OPA光束掃描至視場邊緣的過程中,主瓣的功率會(hui) 降低,而0°附近的背景噪聲(柵瓣和旁瓣)會(hui) 升高。在實際工藝中,光波導的間距小於(yu) 半波長會(hui) 出現波導間的能量串擾,而間距大於(yu) 半波長會(hui) 出現柵瓣並導致多光束混疊,從(cong) 而限製了掃描範圍。然而在目前OPA的研究中,大的轉向角度和小的發散角難以兼顧。例如,最大的掃描角度為(wei) 120°,但發散角卻有1.6°,采用不等寬波導雖可有效抑製波導串擾,但這種結構不能製作光柵進行二維掃描;通過擴大OPA波導數目至8192路可達到最窄的光束發散角0.01°,但其橫向視場僅(jin) 有100°。 其四,光柵天線損耗大。一般的光柵天線同時向上下兩(liang) 個(ge) 方向發射光,其中,向下出射的光會(hui) 進入襯底,而無法作為(wei) 主瓣出射用於(yu) 距離探測。因此,一般的光柵天線損耗都大於(yu) 50%,出射光束的能量較低。 其五,芯片整體(ti) 功耗大。目前常用的調節波導相位的方案是熱光調製,單獨一路的相位調製功耗在數十毫瓦量級,隨著芯片規模擴大至上千路,功耗將成倍增加至幾十瓦,遠遠超出了芯片耐受功率的極限。 矽基光學相控陣芯片性能的新突破 吉林大學電子科學與(yu) 工程學院矽基光電子研究團隊(以下簡稱“研究團隊”)緊跟國內(nei) 外矽基OPA激光雷達芯片的研究進展,麵向技術和器件的發展瓶頸,自主創新,攻堅克難,在致力於(yu) 提升矽基OPA芯片性能的道路上取得新突破,並開展了基於(yu) OPA的調頻連續波遠距離測距工作。 在矽基OPA芯片的設計方麵,研究團隊經過充分調研和仿真,設計並製作了國內(nei) 首個(ge) 1×128路PN結調相的OPA芯片(見圖1)。該芯片采用了由矽(Si)、氮化矽(Si3N4)組成的雙層波導,兼顧了氮化矽的低損耗、高功率閾值、高工藝容忍度特性以及矽的高調製效率特性。該芯片具有大轉向角度、高分辨率、超低功耗、高速轉向等優(you) 點。得益於(yu) 研究團隊特殊設計的非等間距光柵陣列天線,芯片能夠實現140°的橫向視場,與(yu) 此同時,天線孔徑為(wei) 4毫米×3毫米,芯片能夠實現0.021°×0.029°的超小發散角。芯片的光耦合采用了氮化矽模斑轉換器來提高芯片光功率閾值。芯片的光傳(chuan) 輸及分束采用了氮化矽波導來降低損耗。芯片的移相器采用了在矽波導上摻雜製作的PN結。由於(yu) 工作在反向電壓下的移相器具有極低的功耗,芯片的總體(ti) 功耗小於(yu) 1毫瓦。PN結移相器的調製速度具有千兆赫(GHz)量級的調製速度,而常用的熱光移相器的調製速度僅(jin) 在千赫(kHz)量級。研究團隊設計並製作的OPA高速掃描控製電路,采用了基於(yu) 現場可編程邏輯門陣列(FPGA)的內(nei) 部並行隨機存取存儲(chu) 器(RAM)陣列技術,可實現小於(yu) 8微秒的點對點掃描速度,為(wei) 大規模點雲(yun) 數據生成提供了硬件支持。2021年,由中國計量科學研究院現場評估了OPA激光雷達的各項指標,鑒定主要技術指標達標,縱向發散角和橫向掃描範圍均是有國際公開報道的二維OPA中的最高水平。 此外,研究團隊還搭建了調頻連續波測距係統(見圖2),通過單邊帶調製器生成三角波掃頻信號,OPA作為(wei) 發射端,光纖透鏡作為(wei) 接收端,通過參考光和反射光混頻後的拍頻信號探測距離,實現了超過100米的測距和108千米/小時的測速,測距絕對誤差為(wei) 3.38厘米。 未來,研究團隊將繼續致力於(yu) 光學相控陣性能的進一步提升,在保證大視場、小發散角的同時提高出射光束的能量密度,攻克片上集成調頻連續波雷達的難關(guan) ,朝著實現激光雷達片上收發一體(ti) 化的方向努力,以期早日研製出高集成度、高性能和低成本的固態激光雷達,打破國外專(zhuan) 利壁壘和技術壟斷,助推我國激光雷達領域的研究、開發與(yu) 應用,為(wei) 智能激光傳(chuan) 感提供更優(you) 質的技術支持,更好地服務於(yu) 我國信息技術的發展需求。 致謝:感謝國家重點研發計劃項目“光電子集成全固態激光雷達係統關(guan) 鍵技術的合作研究”(項目編號:2016YFE0200700)和國家自然科學基金重大項目“鍺矽雪崩光電探測器陣列及相幹成像激光雷達係統的研製”(項目編號:62090054)的支持。 本文刊登於(yu) IEEE Spectrum中文版《科技縱覽》2022年11月刊。 專(zhuan) 家簡介 李盈祉:吉林大學電子科學與(yu) 工程學院博士研究生。 陳柏鬆:吉林大學電子科學與(yu) 工程學院博士研究生。 宋俊峰:吉林大學電子科學與(yu) 工程學院集成光電子國家重點實驗室教授。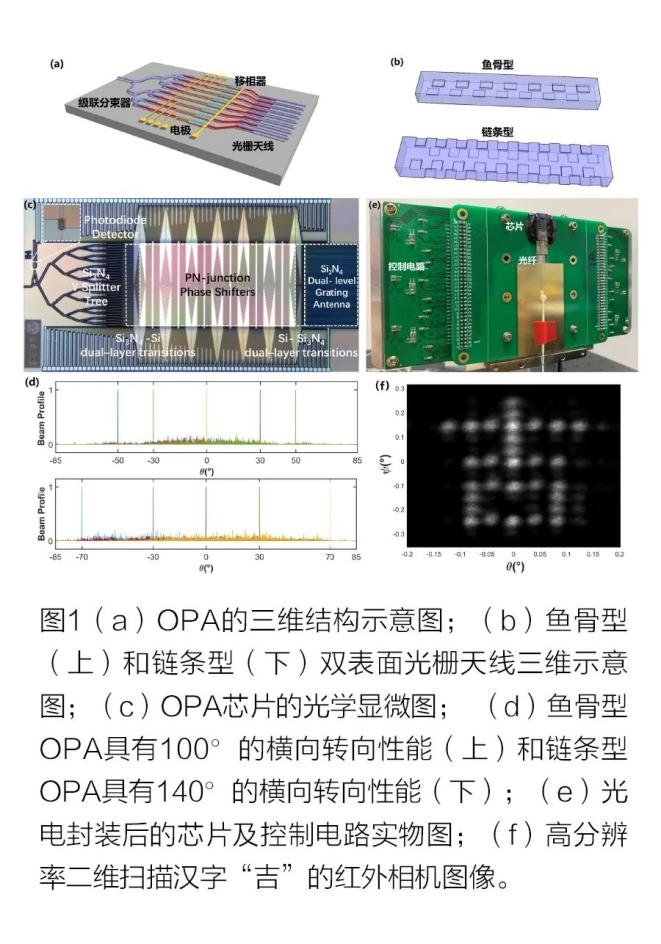
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們