




2024年2月1日,上海交通大學醫療機器人研究院楊廣中院士團隊聯合華中科技大學陶光明教授團隊在Cell Press細胞出版社期刊Matter上在線發表了題為(wei) “Flexible fiberbotic laser scalpels: material and fabrication challenges”的展望文章。
文章闡述了激光手術刀和連續體(ti) 機器人技術的基本工作機理與(yu) 潛在應用,討論了其在精準外科醫療領域的研究進展,並提出了柔性纖維機器人激光手術刀作為(wei) 潛在的新型微創外科手術加工技術,在提升智能化醫療機器人功能性和臨(lin) 床適應性方麵的優(you) 勢和巨大挑戰,並對該領域的未來方向進行了展望。
微創手術具有安全、切口小和術後恢複快等獨特優(you) 勢,極大促進了精準外科醫療的發展。隨著現代醫學和生物工程學等學科的發展,手術刀已從(cong) 單一的金屬刀具發展到超聲刀、射頻電刀等,這極大地提升了手術效率。盡管如此,在複雜手術場景中,手術刀存在器件尺度大、剛性強和操控性不足等問題,嚴(yan) 重降低了手術治療效果。激光手術刀技術的出現是精準外科醫療領域的重要裏程碑,大量臨(lin) 床研究證明其具有高消融精度和效率、出血少和副損傷(shang) 小等顯著優(you) 勢,在微創手術組織加工中具有廣闊的應用前景。然而,微創手術對於(yu) 小尺度柔性激光能量傳(chuan) 輸介質的機械和光學性能的高要求,以及傳(chuan) 輸介質與(yu) 醫療機器人的集成方式的局限性,給激光手術刀技術在微創手術中的深入應用帶來了巨大挑戰。
與(yu) 基於(yu) 機械加工的傳(chuan) 統手術工具不同,激光手術刀通過獨特的組織光學作用實現高效生物組織加工。文章詳細闡述了針對軟組織與(yu) 硬組織切除的光熱消融與(yu) 光致機械消融機理,並討論了水介導和超短脈衝(chong) 激光技術在緩解組織凝結、碳化等熱損傷(shang) 方麵的研究進展(圖1)。進一步地,文章分析了以Nd、Ho、Tm、Er和CO2激光為(wei) 主的紅外醫療光源在牙科、泌尿外科等多種手術領域的特點、優(you) 勢與(yu) 應用價(jia) 值,並強調新型手術激光光源技術的進步給激光傳(chuan) 輸介質在靈活性、穩定性和操控性等方麵帶來的巨大挑戰。
激光傳(chuan) 輸介質作為(wei) 激光手術刀係統中的關(guan) 鍵器件,需要穩定地將激光能量遞送至特定手術部位。文章係統闡述了導光臂、空心波導和紅外光纖三類主要醫用激光傳(chuan) 輸介質的研究現狀,並強調小尺度、高靈活性的紅外光纖器件在微創外科醫療中的應用潛力。文章全麵分析了紅外光纖器件的研究進展,從(cong) 激光傳(chuan) 輸閾值、光學損耗和機械柔性角度比較了光纖在Er激光和CO2激光中的器件性能(圖2),並指出高光學損耗和低機械強度是限製紅外光纖器件在外科手術中深度應用的關(guan) 鍵因素。近年來多材料纖維技術的快速發展,不同光、力、電、磁等物理性能的複合材料高度一體(ti) 化集成,為(wei) 開發高柔性低損耗中紅外光纖並進一步提升手術器械功能性提供了可靠研究支撐。
手術器械的精準操控是實現高效微創手術的重要因素。材料科學與(yu) 生物工程學科的快速發展,催生了驅動方式多樣的連續體(ti) 手術機器人研究,促進了精準外科醫療發展。文章全麵分析了現有連續體(ti) 機器人的驅動機理與(yu) 特性(圖3),指出基於(yu) 磁驅動方式的連續體(ti) 機器人在安全、精準和智能化外科手術介入中的巨大潛力。此外,文章進一步提出了柔性纖維機器人激光手術刀的概念,激光手術刀與(yu) 醫療連續體(ti) 機器人的結合推動了其更為(wei) 廣泛的臨(lin) 床應用,這些係統已成功應用於(yu) 泌尿外科、婦科和耳鼻喉科手術。
為(wei) 適應更為(wei) 複雜的臨(lin) 床生理結構和手術環境,需要進一步提升手術器械功能性。文章重點介紹了醫療機器人在定位、成像和信息感知等方麵的研究進展,探討了基於(yu) 電磁追蹤(EM)和布拉格光纖光柵(FBG)傳(chuan) 感器的定位係統、基於(yu) 電荷耦合元件CCD/CMOS和光纖束的成像係統、力感知以及溫度感知反饋器件等技術的發展、特點與(yu) 應用潛力。此外,文章提出了一種基於(yu) 連續體(ti) 機器人架構的柔性纖維機器人激光手術刀,它集成有定位、成像和感知功能,由連續體(ti) 機器人骨架和功能裝置組成,其核心功能是激光消融、驅動和獲取信息,通過激光傳(chuan) 輸介質、驅動模塊和嵌入機器人骨架中的傳(chuan) 感器來實現(圖4)。
外科手術器械的創新發展是驅動精準外科醫療技術快速進步的重要因素。激光手術刀正不斷朝著小尺度、高度靈活、高效率的方向發展,並通過與(yu) 導航操控、定位、成像和信息感知等功能器件深度融合,以滿足更為(wei) 狹窄、複雜多樣的手術環境需求,在臨(lin) 床領域取得了諸多突破性進展。文章的最後總結了未來柔性纖維機器人激光刀在精準外科醫療中的優(you) 勢和巨大挑戰,並對該領域的未來發展方向進行展望(圖5):(1)激光傳(chuan) 輸介質的材料、結構與(yu) 製造,通過高性能生物相容材料創新與(yu) 高性能波導結構設計,結合先進纖維製造手段,實現穩定、高效醫療激光輸出的柔性激光傳(chuan) 輸介質開發。(2)醫療機器人的驅動、建模與(yu) 傳(chuan) 感,麵向狹窄的解剖結構空間,深入探究醫療機器人驅動機理與(yu) 新型結構設計,實現精準、安全的外科診斷與(yu) 操作。(3)多材料纖維器件的開發,為(wei) 臨(lin) 床介入提供更為(wei) 靈活和智能化的手術工具。(4)光纖尖端微納結構的設計與(yu) 製造,豐(feng) 富纖維機器人的多模態操作策略。(5)光纖側(ce) 表麵上的分布式傳(chuan) 感,為(wei) 機器人提供了精確獲取局部環境信息的能力。
華中科技大學博士生鄒鬱祁、任誌禾、向遠卓、碩士生劉超為(wei) 論文共同第一作者,上海交通大學楊廣中院士與(yu) 華中科技大學陶光明教授為(wei) 論文共同通訊作者,合作單位還包括中國科學院西安光學精密機械研究所等。該工作得到了國家重點研發計劃、國家自然科學基金、華中科技大學交叉研究支持計劃等項目的支持。
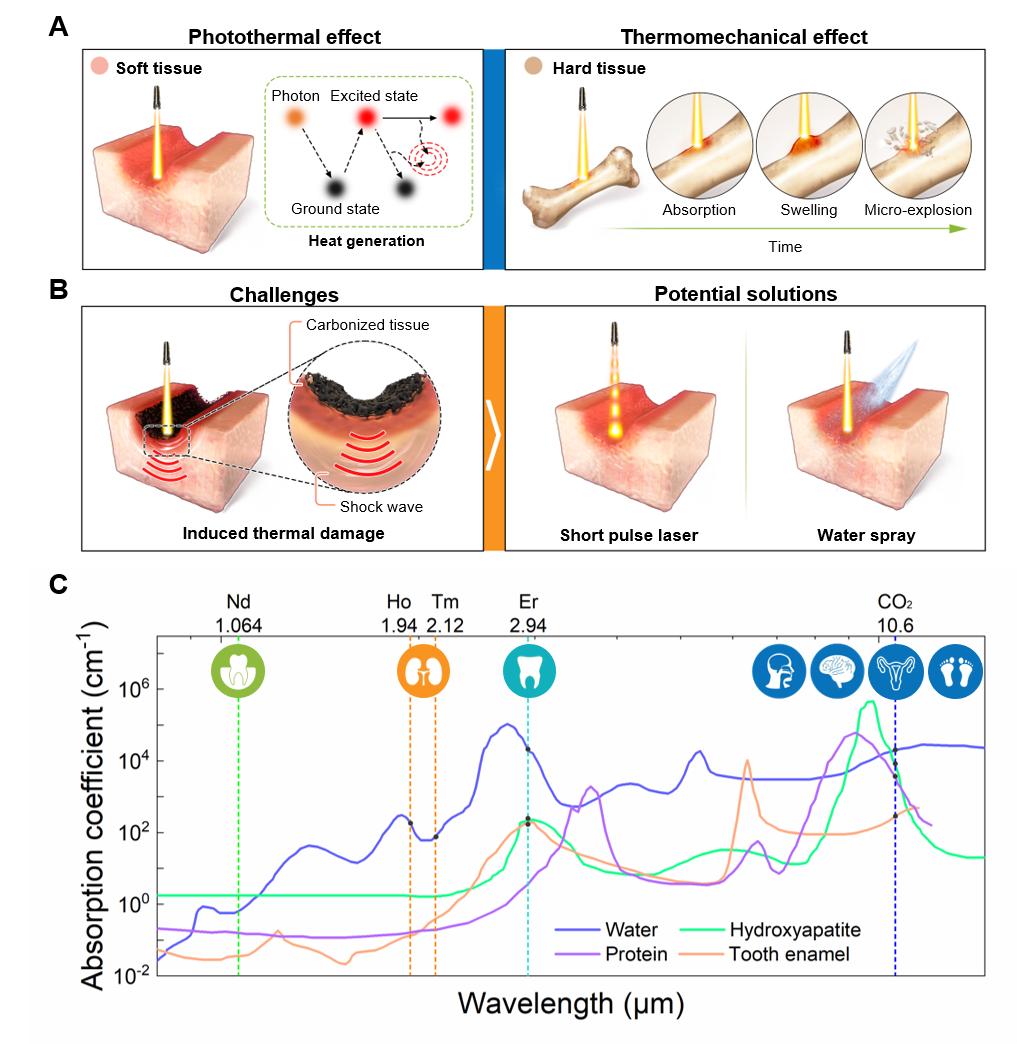
圖1 激光消融機理與(yu) 臨(lin) 床應用。
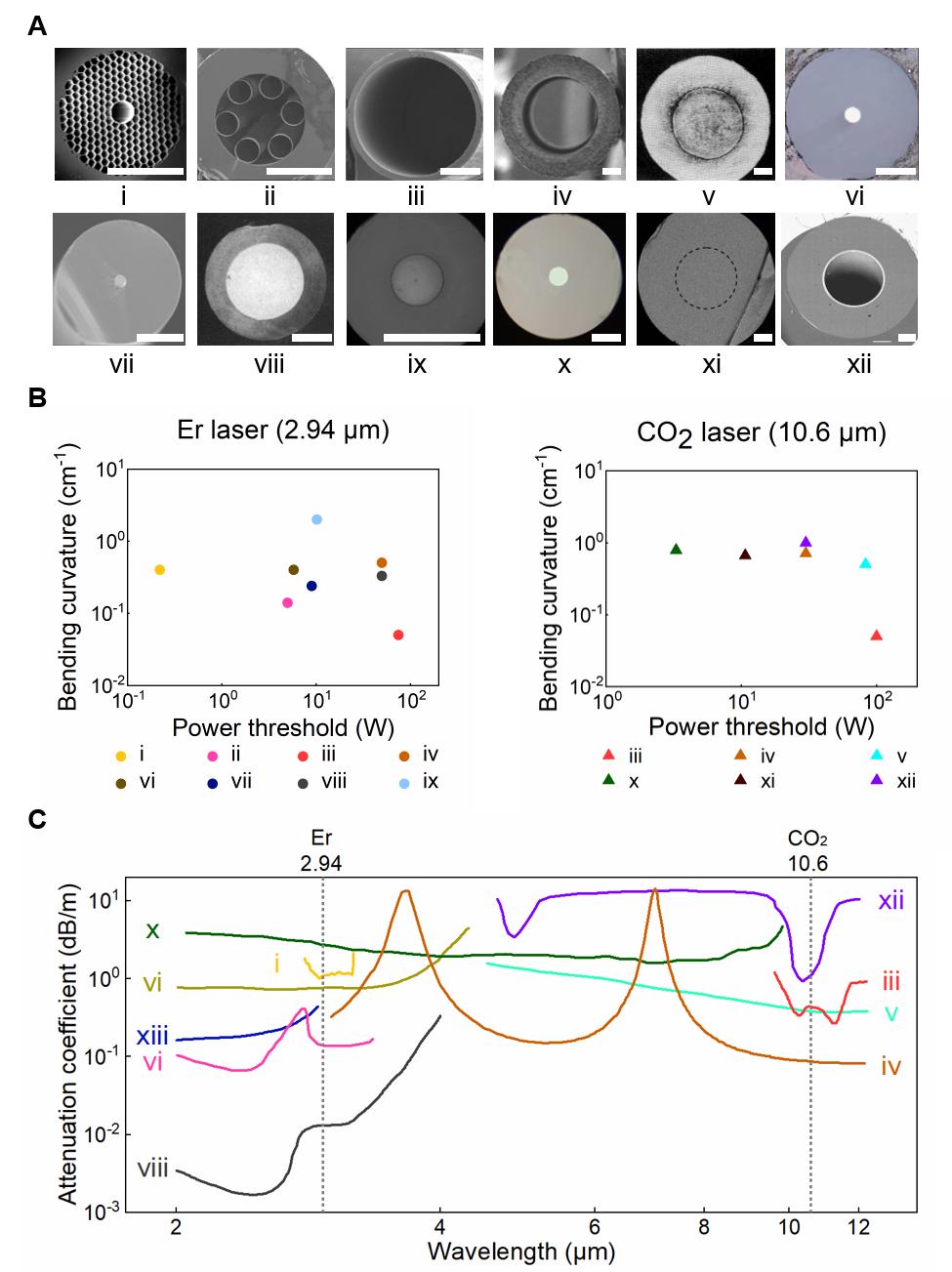
圖2 典型中紅外光纖器件及其性能對比。
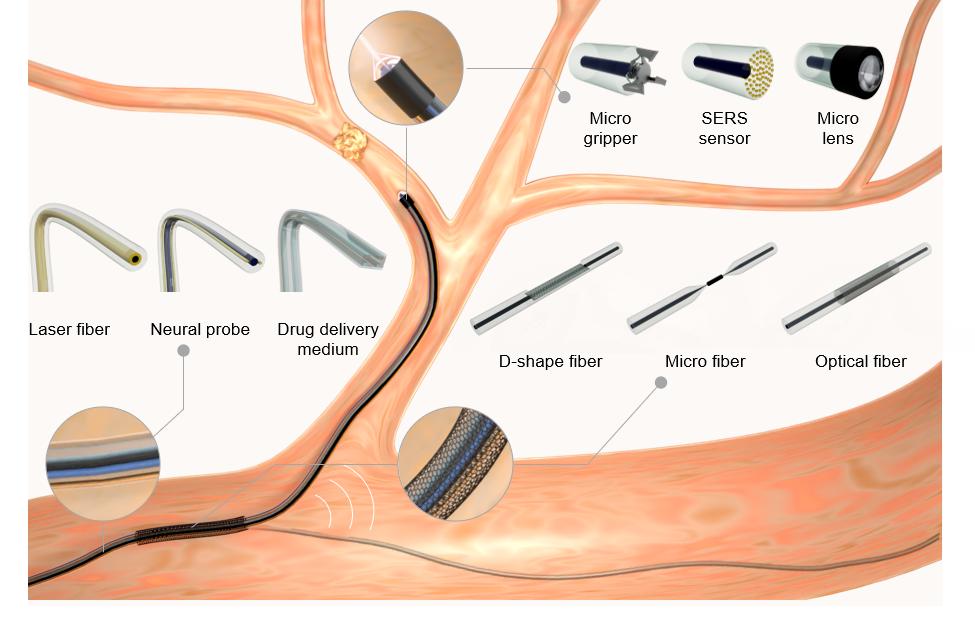
圖3 醫療連續體(ti) 機器人驅動方式。
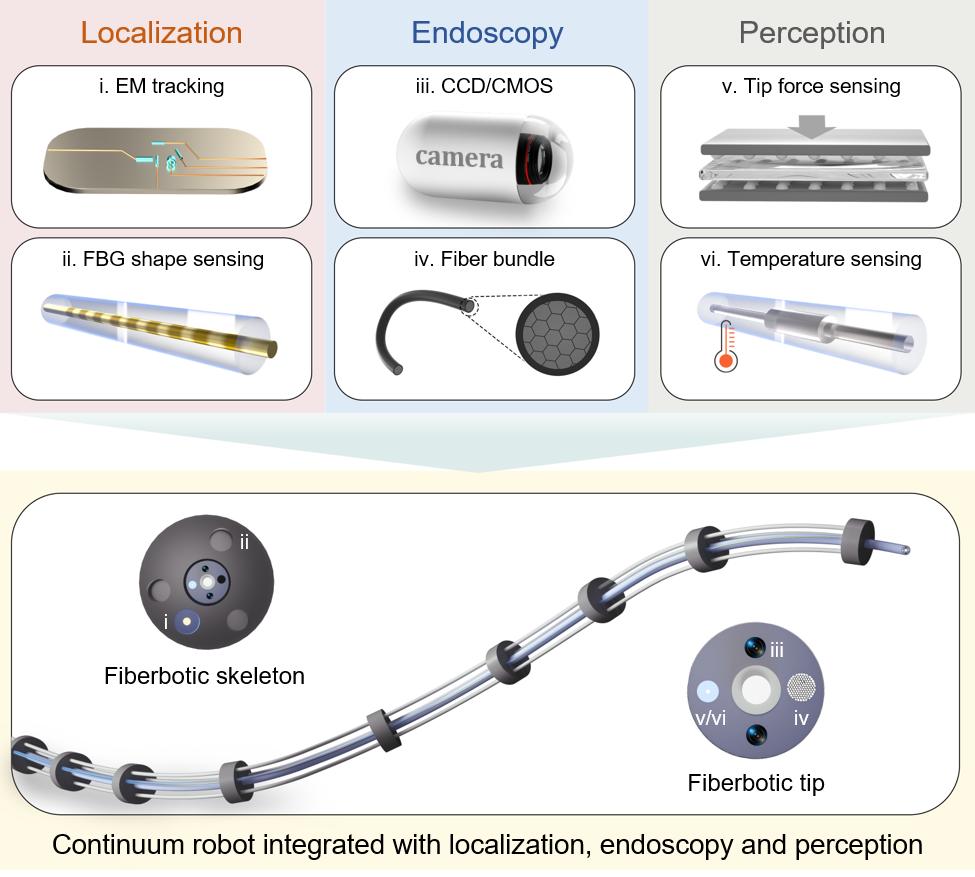
圖4 可定位、成像與(yu) 感知的多功能連續體(ti) 機器人。
圖5 未來的柔性纖維機器人激光手術刀。
作者專(zhuan) 訪
Cell Press細胞出版社公眾(zhong) 號特別邀請陶光明教授代表研究團隊接受了專(zhuan) 訪,為(wei) 大家進一步詳細解讀。
CellPress:
近年來醫療機器人研究發展迅速,那麽(me) 請問陶教授,您是如何踏上醫療機器人研究之路的呢?
陶光明教授:
我在從(cong) 事科研初期,致力於(yu) 紅外光纖、功能纖維的基礎研究工作,我們(men) 也不斷嚐試將我們(men) 的科研成果回饋社會(hui) 、造福人民。後來在與(yu) 本文共同作者、上海交通大學楊廣中院士的交流中,我也逐漸意識到醫療機器人的巨大潛力。楊院士在醫療機器人領域取得的卓越成就、傳(chuan) 遞的科研思維觀念,特別是他在Science Robotics創刊文中的經典論述[Sci. Robot. 2018,3, eaar7650],闡明了醫療機器人的未來發展方向,深刻地影響啟發了許多像我一樣的年輕科研工作者。
CellPress:
您能否介紹一下您團隊目前在醫療機器人前沿領域的研究工作?這些工作的應用前景如何?
陶光明教授:
我們(men) 團隊目前在醫療機器人領域的研究工作主要聚焦於(yu) 開發用於(yu) 微創外科手術的多功能醫療纖維機器人,我們(men) 認為(wei) 這類高操縱性和強操作性的纖維態智能手術器件在精準醫療領域具有極大的應用潛力。通過纖維機器人數字化結構設計與(yu) 多材料纖維製造技術,我們(men) 已經實現了200 mm/s流速下亞(ya) 毫米血管內(nei) 醫療纖維機器人逆流進動與(yu) 多重級聯栓塞操控,解決(jue) 了遠端亞(ya) 毫米血管病灶的靶向精準抵達與(yu) 多模態操作問題[Sci. Robot. 2024, 9, eadh2479]。此外,我們(men) 開發的柔性激光消融多材料纖維機器人,可實現了小彎曲半徑下的穩定強激光輸出,解決(jue) 了微創硬組織手術中手術工具靈活操作受限的問題[iScience 2022, 25, 105167]。在未來的研究工作中,我們(men) 仍麵臨(lin) 材料科學、光學、工程製造和臨(lin) 床醫學等不同學科交叉帶來的新問題,解決(jue) 這些問題需要多學科科研人員的共同協作和努力。
CellPress:
文章指出,在所有連續體(ti) 機器人驅動方式中,磁驅動技術更適用於(yu) 柔性纖維機器人激光手術刀,實現精準微創醫療手術。您認為(wei) 該技術的優(you) 勢在哪裏?
陶光明教授:
不管是基於(yu) 繩索和同心管等外源驅動方式,還是基於(yu) 氣壓、液壓和形狀記憶材料等內(nei) 源驅動方式的醫療連續體(ti) 機器人,在不同的外科領域均有其適用性,本文作者團隊也進行了大量基於(yu) 不同驅動機理的機器人研究工作[Sci. Adv. 2020, 6, eaba5660] [Sci. Adv. 2024, 10, eadj1984]。但我們(men) 均認為(wei) 在微創手術中,往往涉及更為(wei) 狹窄、彎曲的複雜手術環境,這對醫療機器人的器件尺度、安全性、靈活性和功能性提出了更高要求,相比之下,磁驅動技術已被大量研究證明是一種安全、精準、高頻及遠程的小尺度多功能醫療機器人驅動方式。
CellPress:
您在博士階段從(cong) 事了特種光纖的基礎研究工作,從(cong) 光學到多學科交叉領域,您在不同學科切換中遇到了哪些困難和挑戰?
陶光明教授:
我在博士期間致力於(yu) 從(cong) 事紅外特種光纖的關(guan) 鍵技術研究,此後,進一步拓展到多材料光電功能纖維材料與(yu) 器件的相關(guan) 研究,在這個(ge) 過程中,我逐漸認識到,當麵對實際問題時,單一學科是有界限的,需要通過多學科交叉融合,不斷吸收各學科的養(yang) 分。在這個(ge) 過程中,不同學科的研究人員打破單一學科的固定觀念是極其困難的,我們(men) 需要保持耐心、包容和樂(le) 觀的心態,為(wei) 解決(jue) 實際問題去攻關(guan) ,盡自己學科的一份力。
作者介紹

楊廣中
英國皇家工程院院士
楊廣中,上海交通大學講席教授、上海交通大學醫療機器人研究院創始人及首席科學家、英國皇家工程院院士。主要研究領域為(wei) 醫療成像技術、傳(chuan) 感技術與(yu) 機器人。他創立了著名的英國帝國理工醫學院的漢姆林中心,2017年被英女皇授勳CBE勳章,是首位獲此殊榮的大陸科學家。

陶光明
教授
陶光明,華中科技大學三級教授、血管衰老教育部重點實驗室副主任。致力於(yu) 零能耗熱管理新材料、智能纖維與(yu) 織物空間和微創醫療纖維機器人等多材料光電功能纖維材料與(yu) 器件的交叉學科研究工作。
相關(guan) 論文信息
論文原文刊載於(yu) Cell Press細胞出版社旗下期刊Matter上,點擊“閱讀原文”或掃描下方二維碼查看論文
▌論文標題:
Flexible fiberbotic laser scalpels: Material and fabrication challenges
▌論文網址:
https://www.cell.com/matter/abstract/S2590-2385(24)00007-9
▌DOI:
https://doi.org/10.1016/j.matt.2024.01.007
閱讀原文
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀




















 關注我們
關注我們