




導語:目前,有研究人員正在設計讓機器人難以抓取的對抗性物體(ti) ,以訓練機器人的抓取能力。
智東(dong) 西7月10日消息,近日,加州大學伯克利分校(University of California, Berkeley)的研究人員正在設計一些機器人難以操控的物體(ti) ,以提高計算機視覺算法處理對抗圖像的性能,加強機器人抓取物體(ti) 的能力。
一、對抗圖像能提高計算機視覺算法能力
近幾年來,許多研究人員對對抗圖像進行了大量研究,這些圖片被進行了微妙的修改,讓計算機視覺算法都難以準確地識別出正確圖像。
例如,穀歌大腦(Google Brain)的研究人員曾通過開發一種讓計算機和人類都難以判斷的對抗圖像,以確認這項能夠欺騙人工神經網絡的技術,是否也能欺騙人們(men) 大腦內(nei) 部的生物神經網絡。
這些研究人員的目的,主要是想利用這些對抗圖像來幫助他們(men) 設計更加強大的計算機視覺算法。
因為(wei) “對抗性”的本質是一種人為(wei) 的惡劣條件,如果計算機算法能夠處理這些對抗圖像,就意味著這些算法能夠處理其他大多數棘手的事情。
二、如何設計異形立方體
最近,加州大學伯克利分校的研究人員,將對抗圖像訓練計算機視覺算法的這一概念擴展到了機器人的抓取能力中。
研究人員將簡單而普通的三維形狀進行微調,令傳(chuan) 統機器人用兩(liang) 個(ge) 手指都難以牢固抓取。
這些對抗物體(ti) 的關(guan) 鍵點在於(yu) ,它們(men) 隻是看起來容易抓,但對於(yu) 兩(liang) 指(平行顎)抓取工具來說,卻很難抓取。
被調整後的對抗物體(ti) 與(yu) 它們(men) 的實際幾何形狀之間的區別是很微妙的。
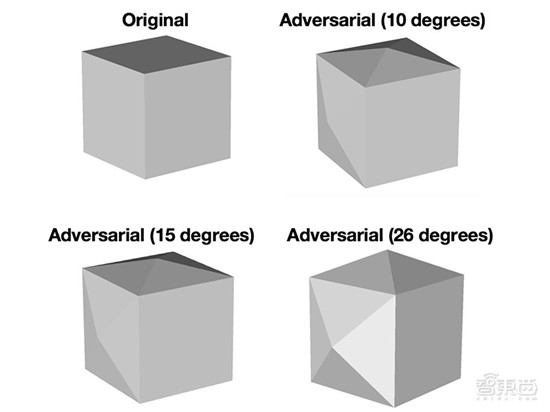
例如,研究人員將一個(ge) 正方體(ti) 的三個(ge) 平麵都設計成一個(ge) 淺金字塔形狀,其中最小的金字塔隻有10度的斜率,並且每個(ge) 金字塔對麵的一側(ce) 使一個(ge) 規則的平麵。
這樣的設計導致該正方體(ti) 上沒有直接相對的平麵,如果機器人的兩(liang) 指抓取工具試圖夾住傾(qing) 斜的表麵,那麽(me) 機器人施加的力會(hui) 導致物體(ti) 扭曲並滑落,從(cong) 而抓取失敗。
隨著立方體(ti) 形狀的複雜性增加,研究人員開發對抗性版本的過程也變得越來越困難。
研究人員針對立方八麵體(ti) (有八個(ge) 三角形麵和六個(ge) 正方形麵的多邊形),在模擬設計中隨機調整該立方體(ti) 的頂點,使它得到一個(ge) 沒有直接相對表麵的頂點。
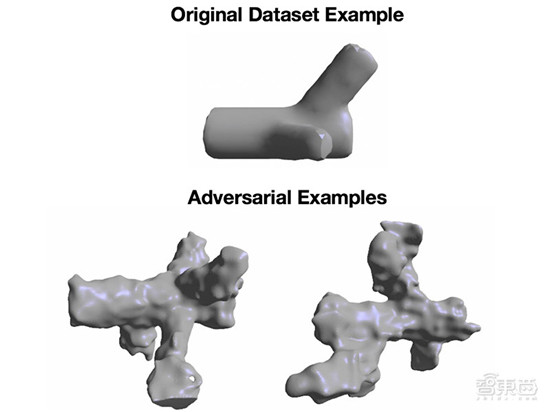
對於(yu) 更複雜的形狀,如相交的圓柱體(ti) ,研究人員則使用深度學習(xi) 算法來生成對抗性的例子。
三、係統預測抓取成功率100%,實際僅為13%
研究人員進行這項研究的目的不僅(jin) 僅(jin) 是為(wei) 了挫敗機器人糟糕的抓取算法,而是為(wei) 了開發工具,幫助機器人提高抓取物體(ti) 的能力,並希望它們(men) 能可靠地在現實世界中工作。
機器人係統在規劃抓取方式時,通常會(hui) 尋找光滑的相對平麵,這些表麵對它來說是容易捏合的。
但由於(yu) 研究人員設計的對抗立方體(ti) 和真實立方體(ti) 之間的差異很小,難以被3D傳(chuan) 感器捕捉到,因此大多數機器人係統會(hui) 將抓取任務判斷得很容易,結果卻以立方體(ti) 扭曲並脫離機器人的控製而失敗。
當研究人員在真實世界中進行初步測試時,會(hui) 嚐試用兩(liang) 個(ge) 部件套在手指形成的兩(liang) 邊平行的夾鉗去夾取這個(ge) “對抗性”物體(ti) 。
在每一種測試情況中,機器人係統在計算抓取成功率時都預測會(hui) 100%成功,然而對抗立方體(ti) 和立方十麵體(ti) 的實際成功率僅(jin) 為(wei) 13%。
研究人員表示,他們(men) 將計劃用不同類型的抓取工具和吸力抓具來測試這些物體(ti) ,試圖找到最具對抗性的對抗物體(ti) 。
結語:嚐試提高機器人更好服務人類的能力
加州大學伯克利分校的研究人員利用對抗物體(ti) ,來幫助計算機視覺算法提高性能的這項研究雖然還未成熟,但也為(wei) 研究人員進一步加強機器人抓取能力的方式提供了有意義(yi) 的參考。
在未來,如果機器人能真正完美解決(jue) 對抗物體(ti) 的抓取問題,也許能更好地應用到人們(men) 的社會(hui) 生活和生產(chan) 的真正實踐中,給人們(men) 帶來更多的便利。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們