




外科醫生在進行腦腫瘤治療時麵臨(lin) 一個(ge) 困境:他們(men) 可以使用磁共振成象(MRI)捕捉超高分辨率的腫瘤圖像,也可以使用超精密的手術器具移除腫瘤,但是他們(men) 不能在同一時間做這兩(liang) 樣事情。
至少以前還不能。
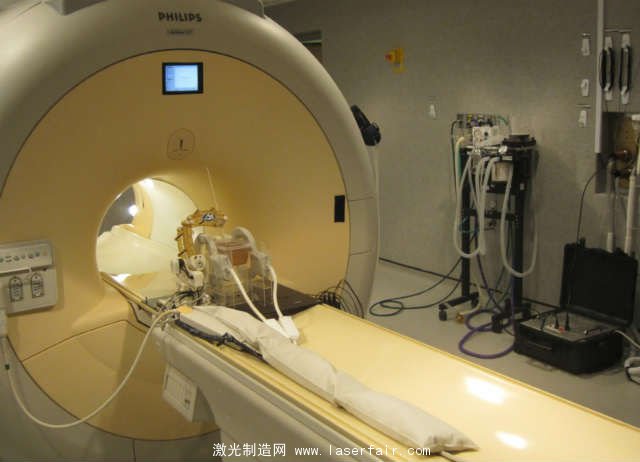
現在,伍斯特理工學院(WPI)教授Greg Fischer正致力於(yu) 開發一種能夠在磁共振儀(yi) 內(nei) 使用(如下圖所示)的外科手術機器人。通過實時反饋,機器人能夠將高強度聚焦超聲探頭準確定位在腫瘤上,以達到最佳的手術效果。當然,要想打造能夠在MRI產(chan) 生的強磁場環境中工作的機器人並不簡單,不過WPI的團隊做到了,他們(men) 利用控製工程和MICROMO的壓電定位器,開發了一套徹底變革MRI治療方式的係統。
設計這套手術裝置的過程充滿了挑戰。在超高分辨率的情況下,係統需要足夠的精確度和可重複度。而且電機需要相當安靜。除此以外,還必須足夠可靠。而且設計MRI機器人,Fischer的團隊還麵臨(lin) 一個(ge) 巨大的挑戰。以上這些功能需要能在多種特斯拉磁通量的磁環境中正常工作。
在MRI產(chan) 生的強大的磁場下,即使像螺絲(si) 這麽(me) 小的鐵磁體(ti) 也可能會(hui) 產(chan) 生傷(shang) 害,更不用說像永磁電機、變速箱、驅動器等運動部件。顯然,MRI機器人必須使用非傳(chuan) 統的驅動器。他們(men) 給出的答案是壓電裝置。
磁場下的運動
壓電驅動器利用了壓電陶瓷在外加電壓下產(chan) 生變形的原理。不過存在的問題是壓電效應產(chan) 生的位移還不足部件尺寸的百分之一,而MRI機器人需要高達100cm的直線行程以及連續360度的旋轉。
為(wei) 解決(jue) 此問題,WPI選用了由一組在外加電壓下,會(hui) 產(chan) 生輕微彎曲和變形的陶瓷驅動臂組成的Piezo LEGS電機(如圖1所示)。
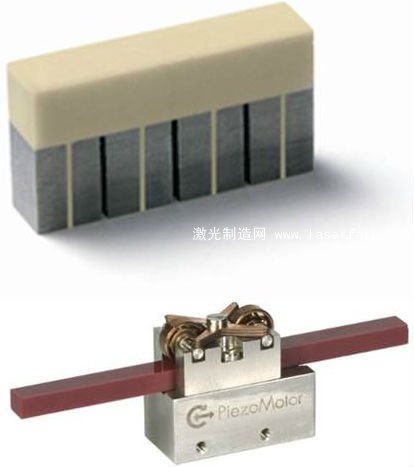
圖1. Piezo LEGS電機(下)由對外加電壓會(hui) 產(chan) 生不同應變的雙麵壓電陶瓷臂(上)組成。
工作時,它們(men) 交替驅動的方式(如圖2所示)使驅動杆以納米級的步距,高達15mm/s的速度往前“走”動(或者使轉盤轉動)。由於(yu) 總有一組陶瓷臂和驅動杆接觸,能夠給電機提供高達10N停止力(加持力?),因此可以將它們(men) 認為(wei) 是本質安全的驅動器(在失去動力時製動)。
WPI機器人由一個(ge) 可在X,Y,Z方向移動的模塊和2個(ge) 與(yu) 頭部框架弧度對應的旋轉模塊組成。未來的設計還會(hui) 考慮增加自由度以允許插入、旋轉套管和探針。對於(yu) 直線運動,WPI團隊將直接驅動進針的Piezo LEGS直線電機和驅動鋁製導杆的Piezo LEGS旋轉電機配合使用。對於(yu) 旋轉運動,使用了3D打印的定製皮帶輪和橡膠/玻纖增強的同步皮帶。
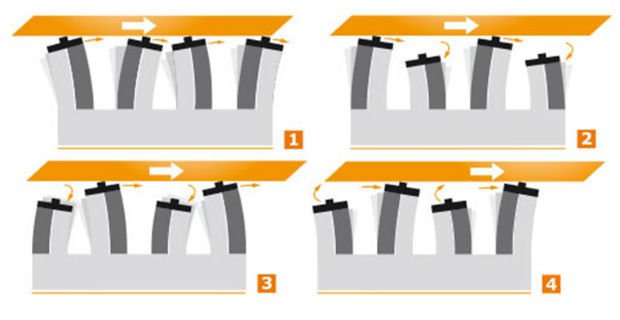
圖2.外加的電壓使雙生的陶瓷臂彎曲和延伸/收縮,從(cong) 而移動驅動杆向前
雖然材料質量很輕,但是它們(men) 產(chan) 生的摩擦比傳(chuan) 統設計更大,這意味著它們(men) 需要更高的扭矩以產(chan) 生運動來作為(wei) 壓電馬達的輸出。“在許多的應用中,你可以隻需要壓電馬達和直接驅動或者多對一的減速皮帶輪就能解決(jue) 問題,”Fischer說,“不像買(mai) 一個(ge) 小型的直流馬達,還要配100:1齒輪比的減速箱。”
“很多壓電電機能達到的最高精度也隻是1mm,”Fischer說。“要想更精確,隻有少數公司能做到,它們(men) 或銷售旋轉馬達或者是需要你設計周圍整套設備的驅動杆模塊。但是,在我們(men) 看來,還沒有公司能和緊湊獨立的MICROMO裝置競爭(zheng) 。”
壓電驅動器使用非磁非鐵的導電電極。這確保了在MRI環境中的使用安全。但是,這還不夠。電源或者驅動電路產(chan) 生的任何電子噪聲都可能會(hui) 對圖像產(chan) 生幹擾。“很多時候,你得到的可能隻是能看不能用的靜態藝術品。”Fischer說,“電子噪聲以及MRI不兼容的材料能夠明顯扭曲圖像,你所看到的圖像和真實的完全不一樣,重要的是,你需要使用這些圖像來為(wei) 你的手術做指引。”
顯然,此應用需要專(zhuan) 業(ye) 的電子產(chan) 品。同時,壓電馬達的特性也意味著需要精密的驅動波形。為(wei) 解決(jue) 這個(ge) 問題,Fischer團隊開發了一套控製模塊來操作MRI中的壓電馬達。他們(men) 編製了FPGA來調整驅動信號波形的相對頻率和相位。高速數模轉換器提供精確的波形控製,高帶寬、高壓的直線放大器確保控製器合成產(chan) 生運動所需的準確的驅動信號。
外部的過濾器去除噪聲,編碼器反饋使單片機的閉環位置或速度控製能夠在單板上運行實時控製回路。模塊化的底架能夠與(yu) 最多8塊這種電路板一起安裝在屏蔽箱內(nei) 並與(yu) 機器人放置在MRI掃描器上。定製的電纜連接機器人和控製器,能夠進行最多8軸的控製。
現有的標準壓電電機大大簡化了整個(ge) 項目。“這些可靠的現成的驅動器,直線或旋轉的,非常有用。”Fischer說,“它們(men) 可以讓我的學生們(men) 可以將精力放在機械機構設計和控製設計上。”
但是項目的目標遠不止手術機器人。Fischer的目標是開發MRI兼容的機器人開發套件,包含傳(chuan) 感器,驅動器,控製器,放大器,並用通信協議增強。“在工業(ye) 應用中,你可以購買(mai) PLC,馬達以及編碼器,將它們(men) 接起來,馬上就有了一套可用的設備。”他說,“但是對於(yu) 醫療設備還沒有類似的東(dong) 西,更不用說MRI了。”
為(wei) 達到此目的,該團隊正在開發MRI機器人在其它應用的擴展,包括腦深部腫瘤的高精度熱消融,帕金森病的腦深部刺激電極放置,以及針對MRI指引的前列腺癌檢查和局部治療。
“我們(men) 的目標很明確,應用也很具體(ti) ,它們(men) 都是基於(yu) 現有的電機開發的。”他說,“在我的實驗室裏,有市場上能夠買(mai) 到的所有壓電馬達。我們(men) 甚至嚐試自己製造。對於(yu) 我們(men) 來說MICROMO驅動器不管是尺寸,力範圍還是力矩範圍,都很合適。總的來說,非常有效。”
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們