




隨著電氣化鐵路的飛速發展,電氣化鐵路越來越多,同時對鐵路的安全運營要求也越來越高,因為(wei) 接觸網是一種特殊對電力機車提供不間斷的電能形式的供電線路,所以在電氣化鐵路的運營過程中必須進行一係列的接觸網檢測工作,以便及時發現隱患並克服存在的問題,保證良好的受流。
從(cong) 國內(nei) 國際來看,現在對接觸網測試的方法主要包括接觸式和非接觸式兩(liang) 種測量方式,接觸式主要偏重於(yu) 接觸網動力學參數測試,非接觸式隻能測量接觸網幾何參數,當前接觸網檢測技術已達到一個(ge) 相當高的水平,基本解決(jue) 250公裏/小時及以下時速的接觸網檢測技術。但有接觸網檢測數據的定位問題一直沒有得到很好解決(jue) 。
由於(yu) 數據定位不準,導致檢測數據出現張冠李戴的問題,但在發展檢測技術的初級階段,對這個(ge) 問題沒有足夠重視,導致接觸網定位檢測技術跟不上其它技術發展的步伐,最終由於(yu) 定位技術的限製,製約了整個(ge) 檢測技術的進一步發展。

1 接觸網檢測數據的定位技術分析
1.1 接觸網定位技術現狀
目前,縱觀國內(nei) 外接觸網檢測定位技術,主要包括如下三種方法:
第一,數據庫定位技術(通過建立線路杆號數據庫,並給定支柱之間的跨距,通過車輛運行是對速度進行處理算出累積裏程,對數據庫內(nei) 跨距進行判斷,得到支柱位置);
第二,拉出值拐點處理技術(利用接觸網固有特點呈之字形設計,通過拉出值檢測數據進行分析處理,找出拉出值檢測數據拐點位置從(cong) 而確定為(wei) 定位位置);
第三,基於(yu) 公裏標測試方法(該方法拋開杆號不管,隻對公裏標進行校對,感覺上誤差比較小運行100公裏誤差1公裏也就誤差1%,但對於(yu) 接觸網維護是基於(yu) 杆號進行,每個(ge) 杆號之間距離僅(jin) 為(wei) 10~60米,這樣就導致維修無法進行,國內(nei) 采用此方法的,同時還增加了輔助定位係統,才能縮小誤差,即是將100公裏分成100份進行公裏標測試,且每1公裏係統自動定位校準,這樣確保1公裏誤差不超過100米,即使將誤差控製1-2個(ge) 杆號內(nei) )。
目前國內(nei) 大多數做接觸網檢測企業(ye) 采用第一種,部分企業(ye) 采用將兩(liang) 種方法結合,個(ge) 別企業(ye) 是采用第三種方法,國外產(chan) 品則主要使用第二種方法和第三種但沒有附加輔助定位係統。
1.2 存在的問題
通過采用以上三種對接觸網檢測數據定位的方法,大量的實驗表明,這三種方法有自己的優(you) 缺點。
第一種方法的優(you) 點是能在確保數據庫很準的前提下,如果速度傳(chuan) 感器不出問題,杆號識別率達到80%,且隻是通過軟件實現,不涉及硬件,工作量相對較小;它的缺點是由於(yu) 鐵路係統線路比較長,數據準確性沒法保證,再有就是速度傳(chuan) 感器與(yu) 車軸連接部位存在打滑,可能導致車輛繼續行走但速度傳(chuan) 感器沒有數據采集,上位機在計算裏程時出錯,導致杆號測量不準。
第二種方法是基於(yu) 純軟件測量方法,依據線路特點(定位點一般在拉出值最大處)對測量數據進行分析,得到杆號位置,通過對軟件不斷修改,杆號正確識別率有可能達到80%,且不需要硬件設備,維護工作量大大減少;該方法缺點是由於(yu) 線路結構比較複雜,軟件處理不了時,隻能不處理,這樣就導致檢測數據錯位。
上述三種方法都是間接對杆號進行測量,不能從(cong) 根本上解決(jue) 杆號測量問題。
1.3 相應的改進措施
基於(yu) 接觸網檢測在定位方麵存在的問題,本文提出一種基於(yu) 二維激光的杆號直接測量方法,這種方法目標就是杆號,這樣就從(cong) 根本上解決(jue) 了杆號不準問題。實踐也證明了本文的理論分析以及測試的精確性和可行性。
2 係統結構和工作原理
接觸網檢測車動態杆號測試係統由接觸網定位器,激光傳(chuan) 感器,以太網,工業(ye) 計算機,DSP嵌入式係統,以及監視器和相應數據采集處理軟件組成。係統結構圖如圖1所示。通過在車頂兩(liang) 側(ce) 垂直向上各安裝一台二維激光傳(chuan) 感器,激光傳(chuan) 感器對準接觸網定位器,通過二維激光傳(chuan) 感器實時對定位器進行掃描,激光傳(chuan) 感器將掃描得到杆號信息,通過以太網傳(chuan) 輸接口將信息傳(chuan) 送到嵌入式處理係統,進行數據分析和處理,通過嵌入式處理係統處理後形成所需杆號信息,最後再通過以太網接口將最終有用信息送往上位機供檢測係統使用,進而對檢測數據進行一一定位。
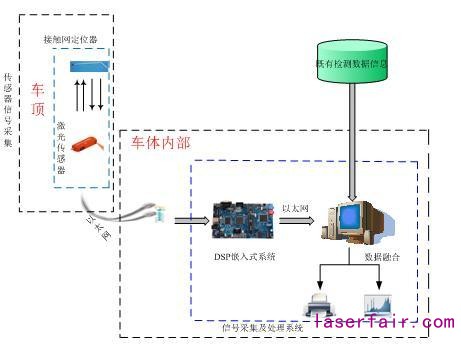
圖1 基於(yu) 二維激光杆號測量原理框圖
由於(yu) 感光元件是固定在傳(chuan) 感器上並有一定區域的,所以隻有當發射光以一定的角度從(cong) 被測物體(ti) 反射時才能被感光元件接收。該傳(chuan) 感器的安裝方法是發射光必須垂直於(yu) 被測物體(ti) ,決(jue) 定反射角度的因素有光源與(yu) 被測物的距離和物體(ti) 的形狀。

所以激光在這個(ge) 速度下完全可以達到實時掃描的目的。
現有檢測車檢測的動態數據和靜態數據多以受電弓為(wei) 基準位置,基於(yu) 此本係統將安裝多組OPTIMESS S1 CCD激光傳(chuan) 感器於(yu) 車體(ti) A、B兩(liang) 側(ce) ,並通過校準使其精確的對準定位管,如圖2所示。避免了單個(ge) 傳(chuan) 感器由於(yu) 定位器的環境汙染,反射能力不夠造成的數據丟(diu) 失,極大的提高了係統的可靠性。
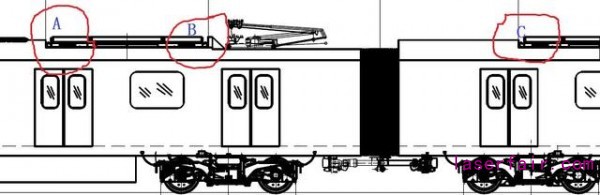
圖2 車體(ti) 安裝示意圖
3 數據分析處理係統
3.1 係統的硬件設計
數據分析處理係統由DSP+FPGA嵌入式開發板、接口電路(USB及RS485)、存儲(chu) 器、上位機等幾部分構成。其工作流程是:定位管杆位信號通過前端激光傳(chuan) 感器及傳(chuan) 輸係統經過以太網接口送至DSP數據采集及分析處理係統,該係統主要由FPGA構成以太網接口電路以及DSP實現的數據處理係統組成。
通過FPGA實現信號的預處理,送至DSP實現信號的再處理標定出當前杆號信息,通過LCD液晶顯示模塊進行實時顯示。另外,還需要將重要的數據存入SD卡存儲(chu) 係統中。,通過以太網接口實現與(yu) 上位機進行通信,進行數據融合。如圖3所示:
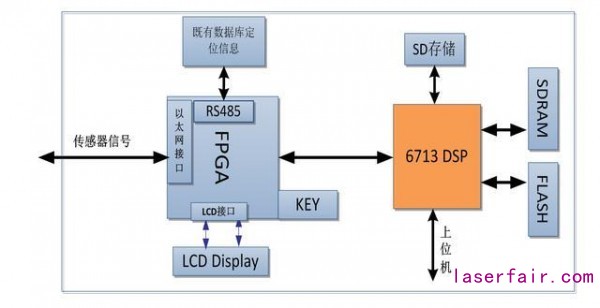
圖3 數據分析處理係統功能框圖
嵌入式係統采用先進的DSP+FPGA架構,使用TI公司的TMS320C6713,最高運算速度達到1350MIPS,SPARTAN XC2S200板載20萬(wan) 門FPGA ,係統最高時鍾頻率為(wei) 200M,2M Bytes 大容量FLASH,AM29LV1605,4M*16 bit SDRAM,MT48LC4M16A2,100M 工作時鍾,最高工作頻率143MHz。保證了足夠的係統資源。適用於(yu) 高速實時檢測的需要。FPGA與(yu) DSP采用EMIF接口進行通訊,FPGA/DSP通信電路如圖4所示:
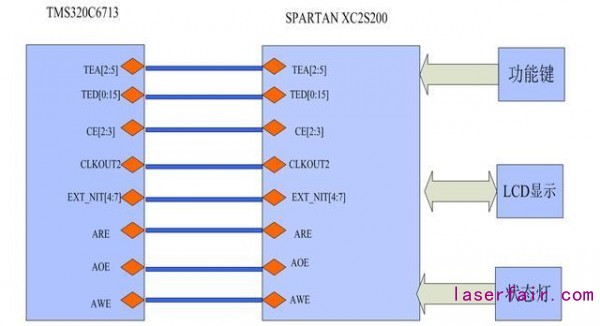
圖4 FPGA/DSP通信電路
3.2 係統軟件設計
3.2.1 DSP處理程序
設定Microcomputer/ Bootloader 為(wei) VC33 的運行模式。運行前程序存放在存取速度較低的Flash 中,係統複位後,由固化在DSP 芯片上的Bootloader, 把程序搬移到高速SRAM 中全速運行。本文隻簡單介紹軟件的功能。程序從(cong) 結構上分為(wei) 主程序和中斷服務程序兩(liang) 部分。
主程序包括:
①係統初始化程序。設置外部存儲(chu) 器接口、串口、定時器、中斷、中斷向量表、鍵盤接口等參數,確定係統的運行模式。
②數據處理程序。把激光傳(chuan) 感器送來的數據轉化成實際的杆號信息,將多組傳(chuan) 感器送來的信號進行數據的融合確定實際的杆號信息,采集數據的高頻噪聲濾波,最終得到反應係統實際工況定位信息。
中斷服務程序包括:
① 信號采集程序。完成四路激光傳(chuan) 感器的信號采集。A/D采集程序占用6713的INT0中斷。
② 鍵盤掃描程序。當有按鍵動作時,讀取按鍵編碼。占用6713的INT7中斷。
③ 通信程序。實現DSP與(yu) FPGA的通訊、與(yu) PC 通信的功能。占用6713的INT7中斷。
3.2.2 FPGA程序包括
1、以太網控製器的實現:
以太網控製器的FPGA設計工作包括以太網MAC子層的FPGA設計、MAC子層與(yu) 上層協議的接口設計以及MAC與(yu) 物理層的MII接口設計。
2、LCD接口的實現:
FPGA主要產(chan) 生LCD顯示所需要的時序,並接受來自DSP的指令和數據執行和顯示。
3、按鍵接口:
實現按鍵去抖動處理,並讀取鍵值發送中斷至DSP進行處理和響應。
4 係統的應用實例分析
基於(yu) 二維激光檢測技術的接觸網動態杆位定位係統結合現有接觸網檢測車通過對金堂到遂寧現場試驗,通過對接觸網參數的檢測和數據的實時傳(chuan) 送,接觸網檢測車精確捕捉到了杆號,該係統數據傳(chuan) 輸準確實時,實時采集,實時傳(chuan) 送,從(cong) 而實現了檢測數據的準確定位,采集杆號的效果如圖5所示:
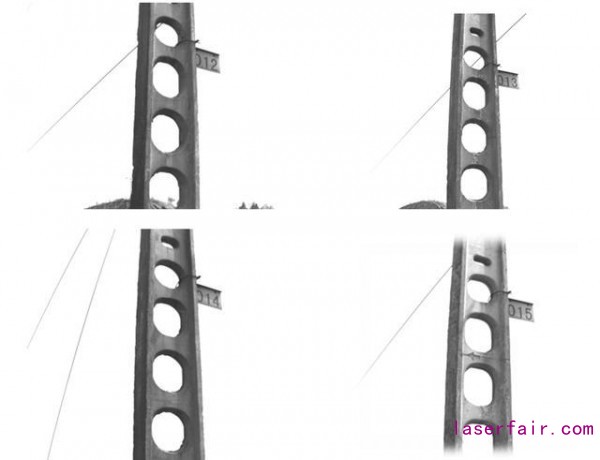
圖5 實驗結果
在接觸線走線標準,沒有橫跨和下錨的情況下,該定位係統效果良好,能夠精確的定位到每一個(ge) 杆號,為(wei) 接觸網動態參數檢測提供參數位置信息。
5 總結
本文通過對當前的接觸網檢測定位技術的分析,對比各種方法的優(you) 缺點,研究了基於(yu) 二維激光檢測技術的接觸網動態杆位定位係統,實驗結果證明了該係統在接觸線走線標準,沒有橫跨和下錨的情況下,定位效果良好,但在存在下錨和橫跨,以及隧道的情況下,激光傳(chuan) 感器將受到幹擾,輸出幹擾信號,引起定位的誤判,影響係統的精確性。所以整個(ge) 係統仍需進一步完善,以便對檢測數據更加準確的實時的定位,為(wei) 以後研究接觸網檢測數據的更精確定位提供了新方法。
本文編自《電氣技術》,原文標題為(wei) “基於(yu) 激光檢測技術的接觸網動態杆位定位係統的研究”,作者為(wei) 張士奎、王元貴 等。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們