





長城汽車、亮道智能、Ibeo就L3/L4自動駕駛量產(chan) 研發簽署戰略合作協議
近日長城汽車、亮道智能、Ibeo就L3/L4自動駕駛量產(chan) 研發簽署戰略合作協議。長城汽車將選用新一代 4D 固態激光雷達ibeoNEXT,第三方測試驗證商亮道智能將負責ibeoNEXT和環境感知係統在長城量產(chan) 項目中的驗證工作。
這是全球第一個(ge) 純固態激光雷達量產(chan) 合作項目,同時也是全球範圍內(nei) 首個(ge) 純固態激光雷達的車規量產(chan) 合作。本次長城汽車選用的4D固態激光雷達ibeoNEXT是一款不含任何運動部件且傳(chuan) 感器輕便、結構緊湊適用於(yu) L2-L5自動駕駛係統量產(chan) 項目的激光雷達。
目前以市麵上現有的L2或L2+自動駕駛輔助技術來看,普遍采用的傳(chuan) 感器是毫米波雷達+攝像頭的組合,在這裏先區分一下什麽(me) 是自動駕駛?什麽(me) 是自動駕駛輔助?按照SAE自動駕駛分級可分為(wei) 六級:無自動化(L0)、駕駛輔助(L1)、部分自動化(L2)、半自動化(L3)、高度自動化(L4)和完全自動化(L5)。L4和L5分類標準的主要區別在於(yu) 自動駕駛係統安全工作時,是否存在限定條件。
自動駕駛汽車需要更安全的傳(chuan) 感器
從(cong) 以上簡單分類來看L1和L2隻能算是輔助駕駛,L3—L5才是真正意義(yi) 上的自動駕駛。
由此可見使用L2高級駕駛輔助係統的車輛在傳(chuan) 感器選擇方麵,激光雷達並非是必須選擇的,而L3-L5這類真正意義(yi) 上的自動駕駛是否需要安裝激光雷達目前還沒有定論。
激光雷達是實現L3及以上自動駕駛的必須品
對於(yu) L3-L5級自動駕駛是否需要激光雷達這一問題,鈦媒體(ti) 采訪到了亮道智能CEO劇學銘。
劇學銘表示:“ 馬斯克說自己的Autopilot裏麵不會(hui) 加入激光雷達,但是Auto Pilot是L2,按照我們(men) 的理解認為(wei) L3的項目上激光雷達是一個(ge) 必須的產(chan) 品,原因很簡單,我們(men) 希望有一個(ge) 安全的駕駛環境”。
隨後劇學銘又補充說到:“L2和L3的最本質區別並不是實現多少的自動化,而是安全責任的轉變,L2級的安全責任在於(yu) 駕駛員身上,而L3的安全責任在於(yu) 車企和傳(chuan) 感器供應商,所以要想實現L3級以上的自動駕駛傳(chuan) 感器的責任至關(guan) 重要,不能出現一點點失誤”。
要知道目前市場上主流攝像頭隻是作為(wei) 整個(ge) 感知的一套解決(jue) 方案,但是要實現L3級自動駕駛時要考慮安全冗餘(yu) ,比如在攝像頭這端要有一個(ge) 備份,跟攝像頭的感知能力相當,甚至更強,所以在車輛行駛安全層麵上激光雷達在L3-L5級自動駕駛上是必要的傳(chuan) 感器。
自動駕駛責任的轉變
當被問到在未來的自動駕駛技術發展中對於(yu) 激光雷達提出了哪些新要求和什麽(me) 才是真正滿足L3-L5自動駕駛使用要求的激光雷達時,劇學銘向鈦媒體(ti) 介紹到:“因為(wei) 亮道智能的團隊早期也都是做自動駕駛的軟件開發,當時我們(men) 了解目前市麵上的各類的傳(chuan) 感器在感知能力上還不夠好,所以也就解釋了自動駕駛技術的發展中為(wei) 什麽(me) 固態激光雷達非常火的原因”。
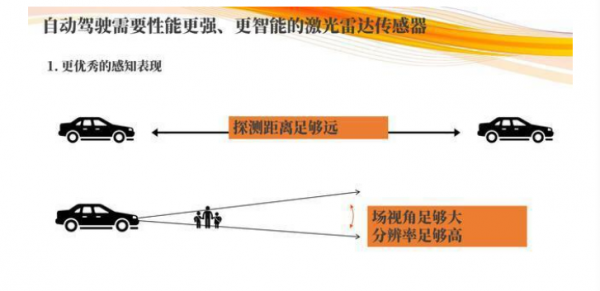
對於(yu) L3-L5從(cong) 感知的要求上來說,車輛需要有更遠的探測距離,特別是在高速上自動行駛時車輛需要更早知道遠處的路況條件,便於(yu) 探測和決(jue) 策。所以從(cong) 激光雷達的出發點和要求來看是要滿足更遠的探測距離和更廣的探測視角、更高的分辨率。
從(cong) 量產(chan) 的角度考慮雷達需要小型化、輕量化,所以激光雷達需要高度集成化,因為(wei) 量產(chan) 版激光雷達需要安裝在量產(chan) 車型上,量產(chan) 車型對於(yu) 外觀的要求是非常嚴(yan) 苛的,首先車輛外觀設計要符合空氣動力學原理,其次需要車輛外觀的整體(ti) 美觀度。
所以對於(yu) 雷達的選型上則需要高度集成化,以上兩(liang) 點都對激光雷達提出了一個(ge) 新的挑戰。

ibeoNEXT固態激光雷達外觀圖
4D固態激光雷達ibeonEXT
此次三方合作選用的4D固態激光雷達ibeoNEXT是一款不含任何運動部件,傳(chuan) 感器更輕便、結構更緊湊,適用於(yu) L2-L5自動駕駛係統的固態激光雷達。
那麽(me) 什麽(me) 是4D激光雷達?4D是來自於(yu) 哪四項?劇學銘向鈦媒體(ti) 介紹到:“首先是一個(ge) 三維的信息,就是傳(chuan) 統激光雷達能夠提供的X、Y、Z,然後另外一維是它的能量信息,也就是Flash通過接收器對於(yu) 能量的識別可以區分能量的強弱”。
ibeonEXT 4D固態激光雷達不但可以構建具有高精度細節的3D環境模型,而且能利用能量信息顯示環境圖像,其涵蓋道路指引信息、道路設施、標牌、交通信號燈等即三維空間內(nei) 每個(ge) 測量點。這也是ibeoNEXT被稱為(wei) 4D固態激光雷達的原因。
ibeoNEXT創建的能量信息圖,和黑白攝像頭記錄的視頻圖像類似,可以與(yu) 激光雷達點雲(yun) 信息配合同步輸出, 再與(yu) 其他車載感知傳(chuan) 感器采集的信息形成冗餘(yu) 。

ibeoNEXT固態激光雷達創建的能量信息圖
亮道自動駕駛測試驗證
隨著高級別自動駕駛技術逐漸走向量產(chan) ,自動駕駛車輛對於(yu) 安全性的需求也在發生著變化。傳(chuan) 感器和感知融合係統的測試驗證是自動駕駛量產(chan) 研發過程中必不可少的環節。車企與(yu) 傳(chuan) 感器研發公司、驗證服務提供商隨著技術的不斷發展合作逐漸緊密。
作為(wei) 高級自動駕駛的驗證服務提供方,亮道智能已經開始在中國與(yu) 德國的研發中心同步啟動了ibeoNEXT的測試驗證工作,為(wei) 該量產(chan) 項目提供高精數據采集平台搭建、全球數據采集、關(guan) 鍵場景提取與(yu) 分析、感知能力測評等測試驗證服務,並且配合ibeoNEXT和長城汽車環境感知係統如期實現SOP。
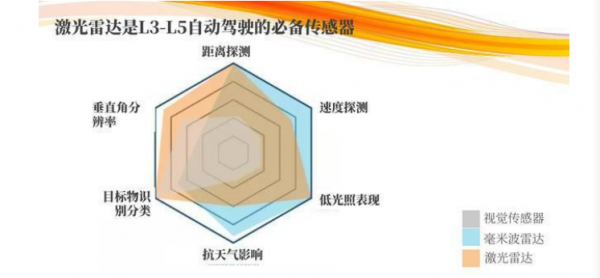
激光雷達是L3-L5必備傳(chuan) 感器
固態激光雷達上車量產(chan) 需要針對不同的汽車環境進行大量測試驗證,要知道激光雷達在開始工作後的單位時間內(nei) 會(hui) 產(chan) 生大量的數據,在激光雷達工作中會(hui) 收集非常多的數據量,要想處理這些數據必須構建數據中心、在數據中心裏完成對采集數據的處理與(yu) 分析來實現自動化場景抓取。
環境感知算法到最終的SOP算法,需要大量的測試驗證來覆蓋不同的特殊場景。量產(chan) 級的激光雷達算法不僅(jin) 包括定位、障礙物識別與(yu) 分類、動態物體(ti) 跟蹤等算法,還有應對各種特殊駕駛環境和路況的專(zhuan) 門算法,同時為(wei) 了保證代碼和功能的安全可靠性,還要進行安全設計和大量測試驗證工作。
總結
縱觀全球,自動駕駛發展正處於(yu) L2到L3的過渡階段。實現量產(chan) 落地之前,我們(men) 還需要不斷進行測試驗證,來完善傳(chuan) 感器的感知性能。
亮道智能CEO劇學銘認為(wei) 激光雷達是實現L3-L5自動駕駛領域非常重要的一種傳(chuan) 感器,傳(chuan) 統機械傳(chuan) 感器不僅(jin) 體(ti) 積大而且成本較高,在一定程度上影響了量產(chan) L3級自動駕駛車輛的發展,隨著量產(chan) 版固態激光雷達的問世,也將促進L3-L5自動駕駛技術的發展。(作者/姚聖祺)
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們