




徐忠揚,張洪祥,陳凱,潘時龍
南京航空航天大學雷達成像與(yu) 微波光子技術教育部重點實驗室
摘要:調頻連續波激光雷達將調頻連續波測距與(yu) 激光探測技術相結合,具有測距範圍大、距離分辨率高、可進行多普勒測速、有利於(yu) 片上集成等優(you) 點。本文首先對調頻連續波激光雷達的測量原理進行分析。隨後,根據光源不同將調頻連續波激光雷達分為(wei) 三類,分別對其技術特點和研究現狀進行闡述。最後,對目前調頻連續波激光雷達的前沿應用進行了簡單介紹。
關(guan) 鍵詞:調頻連續波激光雷達;測距;激光探測
激光雷達作為(wei) 雷達概念的一種延伸,利用激光進行目標探測,從(cong) 反射光中獲取目標距離、速度、方位等信息。相較於(yu) 微波雷達,激光雷達采用波長更短的光學信號,具有定向性好、空間分辨率高、抗幹擾能力強、體(ti) 積小、重量輕等優(you) 點。自上世紀60年代以來,激光雷達得到了迅速發展,在遙感、大氣探測、自動駕駛、三維成像等領域獲得了廣泛應用。根據發射信號不同,激光雷達可以分為(wei) 兩(liang) 類:脈衝(chong) 激光雷達和連續波激光雷達。脈衝(chong) 激光雷達采用脈衝(chong) 光信號作為(wei) 探測信號,通過精確測量反射光脈衝(chong) 飛行時間,獲取目標距離信息。脈衝(chong) 激光雷達分辨率相對降低,為(wei) 了提高距離分辨率,需要使用低時延抖動的短脈衝(chong) 以及超快光電子器件等。同時,脈衝(chong) 激光雷達一般采用直接探測獲取回波信號,無法進行多普勒測速;較高的脈衝(chong) 功率也對器件性能和人眼安全性提出了要求。
連續波激光雷達采用連續光信號作為(wei) 探測信號,具有峰值功率低,分辨率高等特點。具體(ti) 而言,連續波激光雷達又可分為(wei) 相位式激光雷達和調頻連續波激光雷達。前者基於(yu) 相位激光測距技術,采用單頻信號調製激光,通過對反射光信號進行鑒相,最終獲得目標距離信息。該方法的缺點是存在模糊距離,測距範圍受限於(yu) 調製頻率。調頻連續波激光雷達則是將現代雷達技術中的調頻連續波測距與(yu) 激光探測技術相結合。該技術采用線性調頻信號調製激光,並通過比較反射光信號和本振光信號的瞬時頻率差獲得目標距離信息。同時,連續波激光雷達一般采用相幹接收,探測運動目標時,測量信號中會(hui) 引入光學多普勒頻移,一方麵會(hui) 對測量結果產(chan) 生影響,另一方麵也可利用多普勒效應對目標進行實時測速。
隨著激光技術、微波光子技術、光通信技術等相關(guan) 領域的不斷發展,調頻連續波激光雷達受到越來越多的關(guan) 注。相較於(yu) 脈衝(chong) 激光雷達,調頻連續波激光雷達具有如下技術優(you) 勢:①測距範圍大;②距離分辨率高;③可實現多普勒測速;④有利於(yu) 片上集成。
得益於(yu) 以上技術優(you) 勢,調頻連續波激光雷達已經在高精度三維成像,遙感測繪和自動駕駛等領域得到了應用。當前飛速發展的集成光子技術,也為(wei) 調頻連續波激光雷達注入了新的活力,片上集成將成為(wei) 調頻連續波激光雷達的重要發展趨勢。
本文將首先對調頻連續波激光雷達的探測原理進行闡述。隨後,根據係統中采用的激光光源對調頻連續波激光雷達特點進行分類闡述。最後,將對調頻連續波激光雷達的前沿應用進行簡單介紹。
1 調頻連續波激光雷達測量原理
現代雷達係統中通常采用線性調頻微波信號作為(wei) 探測信號,通過比較回波信號與(yu) 參考信號的瞬時頻率,獲得目標距離信息。調頻連續波激光雷達便采用了與(yu) 之相似的技術,利用線性調頻光信號作為(wei) 探測信號。典型的調頻連續波激光雷達係統如圖1所示。該係統中核心組件是能夠產(chan) 生線性調頻光信號的激光光源。該光源可以是內(nei) 調製激光光源、啁啾脈衝(chong) 激光光源、外調製激光光源等。線性調頻光信號經由光學分束器進行分束,其中一路作為(wei) 本振光信號,另一路作為(wei) 探測信號由光學準直係統照射到目標表麵。待測目標的反射光信號由光學準直係統接收,通過光纖環形器和光纖耦合器後,與(yu) 本振光信號合束,並通入光電探測器中進行相幹拍頻。最終,信號處理係統從(cong) 光電探測器的光電流信號中提取目標距離和速度等信息。

圖1 調頻連續波激光雷達係統圖
調頻連續波激光雷達的測量原理如圖2所示。由於(yu) 探測光信號為(wei) 線性調頻信號,其瞬時頻率與(yu) 時間成線性關(guan) 係。當回波延時存在時,反射光信號與(yu) 本振光信號間將產(chan) 生正比於(yu) 回波延時的瞬時頻率差。在實際激光雷達係統中,該差頻信號由反射光信號與(yu) 本振光信號相幹拍頻獲得。相幹拍頻時,光電探測器產(chan) 生的光電流信號進行低通濾波後,通過信號處理,即可獲得反射光信號的回波延時及目標距離信息。

圖2 調頻連續波激光雷達測距原理
若探測光信號波形選取為(wei) 鋸齒形線性調頻信號,其瞬時頻率可表示為(wei) :

式中,f0為(wei) 光信號的初始頻率,B為(wei) 光信號的調製帶寬,T為(wei) 光信號的調製周期。此時,通過低通濾波後的光電流信號具有如下形式:

式中,A為(wei) 光電流信號的幅度,t為(wei) 回波延時,φ為(wei) 恒定相位。由式(2)可知,光電流信號的頻率正比於(yu) 回波延時。因此,若已知光電流信號頻率,即可利用如下關(guan) 係獲取目標距離信息:

式中,c為(wei) 真空中光速。進一步分析可知,調頻連續波激光雷達的距離分辨率則取決(jue) 於(yu) 光信號的帶寬,兩(liang) 者之間具有如下關(guan) 係:

因此,為(wei) 了獲得更高的距離分辨率,調頻連續波激光雷達需要具有更大的調製帶寬。
上述測量原理中,待測物為(wei) 靜止目標。當待測目標為(wei) 運動物體(ti) 時,回波信號將產(chan) 生多普勒頻移。多普勒頻移與(yu) 差頻信號疊加,結果如圖3所示。此時,光電流信號將表示為(wei) :

式中,fd為(wei) 光信號的多普勒頻移。激光雷達中,光信號的多普勒頻移較高,將嚴(yan) 重影響調頻連續波激光雷達的性能。因此,距離和速度的解耦是調頻連續波激光雷達中的是重要問題之一。

圖3 三角波形調頻連續波激光雷達測距測速原理
一種有效的解決(jue) 方案是在調頻連續波激光雷達中同時產(chan) 生正負雙啁啾的光學信號。具體(ti) 可通過三角波形線性調頻信號和雙邊帶調製的方法實現。圖3以三角波形線性調頻信號為(wei) 例進行說明。在正啁啾階段,相幹拍頻產(chan) 生的光電流信號仍然具有式(5)所示形式,而在負啁啾階段,光電流信號的表達形式變為(wei) :

因此,最終獲得的拍頻信號將由兩(liang) 個(ge) 單頻信號組成,其頻率分別為(wei) fR+ fd和fR - fd,計算二者和與(yu) 差即可分別得到fR和fd,並由此獲取目標距離和速度信息。當然,在三角波形線性調頻信號下,兩(liang) 個(ge) 單頻信號實際上分處於(yu) 不同時段,無法實現真正意義(yi) 的實時測量。利用雙邊帶調製同時產(chan) 生正負雙啁啾信號,則可實現對距離和速度的實時測量。
2 調頻連續波激光雷達的分類
調頻連續波激光雷達的核心組件是能夠產(chan) 生線性調頻光信號的激光光源。目前已有報道的調頻連續波激光雷達中,激光光源可分為(wei) 三類:內(nei) 調製激光光源,啁啾脈衝(chong) 激光光源以及外調製激光光源。本文將根據激光光源的不同對調頻連續波激光雷達進行分類,並分別介紹其特點和發展現狀。
2.1 基於(yu) 內(nei) 調製激光光源的調頻連續波激光雷達
調頻連續波激光雷達中,為(wei) 了獲得線性調頻光信號,可采用能夠直接產(chan) 生啁啾光信號的內(nei) 調製激光器。具體(ti) 又可分為(wei) 兩(liang) 類:第一類是采用線性調頻信號調製激光光強。此時激光器輸出光強為(wei) 線性調頻信號;第二類則通過調製信號改變激光頻率,光場本身為(wei) 線性調頻信號,該類激光器又稱為(wei) 掃頻激光器。其中,第一類激光器調製方式簡單,一般采用直接探測獲取回波信息,探測距離較短。同時,調製過程中激光頻率也會(hui) 改變,影響測量結果。第二類激光器調製帶寬較大,但受限於(yu) 激光調諧機理,掃頻速度較慢。同時,調製信號與(yu) 激光瞬時頻率之間往往存在非線性關(guan) 係,需要進行頻率校準。
強度調製激光器是最早提出並應用於(yu) 調頻連續波激光雷達的激光光源。1996年,美國海軍(jun) 實驗室的研究人員采用強度調製GaAIAs激光器結合直接探測,實現了激光測距,並在此基礎上演示了激光三維成像。隨後,研究人員采用相似的方法,實現了對大氣氣溶膠等隨機分布介質的探測。相較於(yu) 強度調製激光器,掃頻激光器具有更大的帶寬,可實現更高的分辨率,因此在高精度測距中應用更為(wei) 廣泛。2009年,美國研究人員采用外腔半導體(ti) 激光器作為(wei) 調頻連續波激光雷達光源,激光器調諧範圍達到100nm。在1.5m的距離下,該係統實現了31um的距離分辨率和86nm的測距精度。2013年,美國國家標準局的研究人員采用光頻梳校準外腔激光器,構建調頻連續波激光雷達,實現了130um的距離分辨率。由於(yu) 采用光頻梳進行校準,該方法克服了掃頻激光器掃描速度慢的劣勢,具有1kHz的更新速率。2018年,日本研究人員則采用低成本的VCSEL激光器作為(wei) 調頻連續波激光雷達光源。實現了距離分辨率360um、精度2um的高精度測距。該係統中采用VCSEL激光器,大幅降低了調頻連續波激光雷達的成本和複雜度。
由於(yu) 掃頻激光器在分辨率上具有明顯優(you) 勢,當前的研究主要采用第二類方案。但是,掃頻激光器同時也麵臨(lin) 著嚴(yan) 重的非線性問題。調頻連續波激光雷達的測量原理要求光信號的瞬時頻率與(yu) 時間呈線性關(guan) 係。然而,自由運轉的掃頻激光器一般難以實現良好的線性掃頻。掃頻過程存在的非線性效應將會(hui) 嚴(yan) 重影響係統性能,導致距離分辨率和測距精度下降,原理如圖4所示。當調諧過程為(wei) 理想線性調頻時,圖中回波信號與(yu) 參考光信號嚴(yan) 格平行,拍頻所得的差頻信號將保持不變。然而,當掃頻過程存在非線性效應時,差頻信號隨時間發生改變,最終導致差頻信號展寬,降低係統距離分辨率。為(wei) 了消除調諧過程中的非線性效應,一般需要對光信號頻率進行實時校準。目前常用的校準方式主要有幹涉儀(yi) 和光頻梳等。利用幹涉儀(yi) 進行校準時,一般采用幹涉儀(yi) 實時測量光信號的頻率偏差,並在信號處理中將其去除。利用光頻梳校準時,則將激光器波長鎖定在光頻梳的不同梳齒上,實現精準調諧。兩(liang) 種方式各有優(you) 勢,前者結構簡單,後者掃頻快速精準。
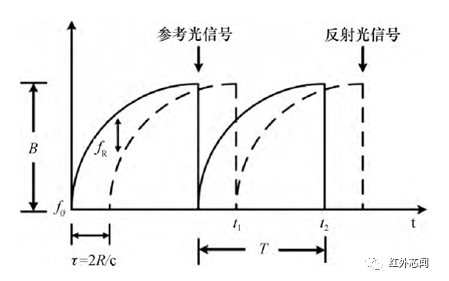
圖4 非線性效應對調頻連續波測距的影響
2.2 基於(yu) 啁啾脈衝(chong) 激光光源的調頻連續波激光雷達
嚴(yan) 格意義(yi) 上,啁啾脈衝(chong) 光源發射的並不是連續光,而是由脈衝(chong) 序列組成的光信號。但是,啁啾脈衝(chong) 激光可視為(wei) 占空比較低的調頻連續波光信號,在脈衝(chong) 內(nei) ,光場瞬時頻率隨時間線性變化,與(yu) 調頻連續波激光雷達的測量原理一致。因此,本文中將基於(yu) 啁啾脈衝(chong) 激光光源的調頻連續波激光雷達作為(wei) 調頻連續波激光雷達中的一類。啁啾脈衝(chong) 激光可通過多種方法產(chan) 生,包括時域拉伸、傅裏葉域鎖模激光器,移頻反饋激光器等。其中應用最廣泛的是時域拉伸,基本原理如圖5所示。

圖5 時域拉伸原理示意圖
時域拉伸需采用寬帶激光光源,如飛秒激光器等。寬帶激光光源的輸出信號中包含了不同頻率的光譜成分,在不存在啁啾的情況下,所有頻率成分的光同時輸出。引入通過色散元件後,不同頻率成分的光場延時不同,導致激光信號在時域上發生展寬,即時域拉伸。當色散導致的延時與(yu) 光場的頻率成線性關(guan) 係時,所產(chan) 生的啁啾脈衝(chong) 光信號就是線性調頻信號。實際應用中,常見的色散元件有光纖、全息光柵、啁啾光纖光柵等。2010年,美國中佛羅裏達大學的研究人員采用鎖模激光器與(yu) 啁啾光纖光柵級聯,產(chan) 生啁啾激光脈衝(chong) 。利用該方法構建的調頻連續波激光雷達距離分辨率可達亞(ya) 毫米量級。2011年,他們(men) 在此基礎上引入兩(liang) 個(ge) 完全相反的啁啾光纖光柵,產(chan) 生具有相反啁啾的脈衝(chong) 光信號。利用該信號,研究人員在激光雷達中同時實現了測距和測速功能。2017年,上海交通大學的研究人員在飛秒激光與(yu) 啁啾光纖光柵級聯的基礎上,采用另一束飛秒激光脈衝(chong) 進行光學采樣,驗證了帶寬高達700 GHz的啁啾光學信號,空間分辨率達到120mm。
基於(yu) 傅裏葉域鎖模激光器構建的測距係統具有更新速率高、距離分辨率高等優(you) 點,目前主要應用於(yu) 光學相幹拓撲(OCT)成像領域,激光雷達領域的應用尚未見報道。在移頻反饋激光器方麵,日本東(dong) 北大學的研究人員則開展了大量研究,實現了物體(ti) 表麵形貌掃描,距離精度可達130mm。傅裏葉域鎖模激光器和移頻反饋激光器等方法所產(chan) 生的啁啾激光具有較窄的瞬時帶寬,通過精確控製反饋係統,可以同時實現較大的脈衝(chong) 帶寬和較低的瞬時帶寬,有助於(yu) 進行高分辨率高精度的激光測距。傅裏葉域鎖模激光器和移頻反饋激光器雖然可以提供較窄的瞬時帶寬.提高測量精度,但是引入的反饋控製係統相對複雜,需要精確控製係統參數,才可以穩定運行。
該類調頻連續波激光雷達具有帶寬較大,更新速率較高等優(you) 點。例如時域拉伸中,飛秒激光的帶寬可達亞(ya) THz量級,大大提高了激光雷達的距離分辨率。同時,啁啾脈衝(chong) 光源具有更高的重複頻率,大幅提高了激光雷達更新速率。利用移頻反饋激光器,德國的研究人員實現了測量精度um量級,更新速率MHz量級的激光測距雷達。而利用基於(yu) 微諧振腔的光頻梳,德國卡爾斯魯厄理工學院的研究人員則實現了高達100MHz的刷新速率。利用該激光雷達係統,他們(men) 成功的對高速運動物體(ti) 進行了實時測量。但是,該類激光雷達仍然存在線性度較差的問題。例如:時域拉伸方法中,色散器件難以實現較高的線性度。
2.3 基於(yu) 外調製激光光源的調頻連續波激光雷達
外調製激光光源一般由單頻激光器和光調製器級聯組成。激光信號光調製器完成調製過程,輸出線性調頻光學信號。常用的調製方式包括強度調製和頻率調製等。強度調製方式采用線性調頻信號對激光進行強度調製,並在接收端利用光電探測器將光強轉換為(wei) 電流,獲得目標距離信息。頻率調製方式則采用電信號調製激光頻率。調製後,激光的瞬時頻率產(chan) 生偏移,偏移量由調製信號的瞬時頻率決(jue) 定。當調製信號為(wei) 線性調頻信號時,輸出光信號即為(wei) 線性調頻信號。最後,在接收端利用相幹探測獲得拍頻信號,提取目標距離和速度等信息。
外調製方式將調製過程轉移到調製器中,降低了光源的複雜度。相較於(yu) 內(nei) 調製激光器,調製器的非線性效應極小,可以避免大帶寬導致的非線性誤差。采用窄線寬激光器作為(wei) 光源,調製器輸出的線性調頻光信號可以同時具有較大的調製帶寬和較小的瞬時線寬,有助於(yu) 同時實現高分辨率和高精度測量。2009年,美國堪薩斯大學的研究人員利用強度調製器產(chan) 生線性調頻光信號,實現了調頻連續波激光雷達。利用該激光雷達,研究人員對370m以外的建築進行了成像。該方案中采用線性調頻光學信號作為(wei) 參考信號,與(yu) 反射光信號進行相幹拍頻,降低了對光電探測器和射頻接收端的帶寬要求。2012年,該小組研究人員進一步利用光學單邊帶調製構建了一種調頻連續波激光雷達,結構如圖6所示。該方案無需聲光移頻器,即可實現外差探測。同時,利用電光調製器進一步增大了帶寬,提高距離分辨率。2018年,天津大學的研究人員利用外調製和循環移頻相相結合,實現了200GHz的調製帶寬,調頻速率高達3.6×1016 Hz/s。該方案不僅(jin) 可以獲得較大調製帶寬,還可實現低至50kHz的瞬時線寬。近年來,隨著微波光子技術的不斷發展,利用微波光子倍頻技術還可以進一步擴大信號帶寬,提高調頻連續波激光雷達的距離分辨率。

圖6 一種基於(yu) 外調製的調頻連續波激光雷達示意圖
相較於(yu) 其他方案,基於(yu) 外調製激光器的調頻連續波激光雷達另一優(you) 點是可以利用豐(feng) 富調製方式,獲得複雜波形的光學信號。研究表明,利用複雜的波形有助於(yu) 實現多功能激光雷達係統。因此,外調製激光器是構建多功能調頻連續波激光雷達的優(you) 選方案之一。2012年,美國堪薩斯大學的研究人員利用光通信中的I/Q調製器,構建了一種正負邊帶複用的激光雷達。該係統利用線性調頻負邊帶進行測距,利用單頻正邊帶進行測速,從(cong) 而在一個(ge) 雷達係統中同時實現測距測速功能。2017年南京航空航天大學的研究人員利用雙邊帶調製技術,同時產(chan) 生正負啁啾的光學信號,實現了對目標的同時測速測距。201 9年,他們(men) 還采用偏振複用雙平行馬赫曾德爾調製器,構建了一種多功能調頻連續波激光雷達,該雷達可以同時測量待測目標的距離、速度和偏振特性。
此外,外調製技術采用線性調頻信號作為(wei) 調製信號,其產(chan) 生方式更為(wei) 成熟。而且,采用微波信號作為(wei) 調製信號,提高了激光雷達與(yu) 微波雷達的技術兼容性,有利於(yu) 構建多傳(chuan) 感器融合的探測係統。
3 調頻連續波激光雷達的前沿應用
3.1 高精度三維成像
激光雷達是一種理想的非接觸三維成像手段,其利用激光束作為(wei) 探測信號,具有較高的空間分辨率。常見的激光雷達中,脈衝(chong) 激光雷達係統簡單,成像速度快,但是距離分辨率較低,難以實現高精度三維成像。同時,脈衝(chong) 激光雷達采用直接探測方式,無法進行多普勒測量、容易受背景噪聲影響。調頻連續波激光雷達則可以獲得比脈衝(chong) 激光雷達更高的距離分辨率,有助於(yu) 實現高精度的三維成像。同時,調頻連續波激光雷達一般采用相幹探測,可以對運動目標進行多普勒測量。因此,調頻連續波激光雷達是一種更具應用前景的高精度三維成像方法。
2017年美國陸軍(jun) 地理空間實驗室的研究人員對比了脈衝(chong) 激光雷達和調頻連續波激光雷達的三維成像效果,結果如圖7所示。其中圖(a)為(wei) 脈衝(chong) 激光雷達的成像結果,圖(b)為(wei) 調頻連續波激光雷達的成像結果。對比發現,調頻連續波激光雷達可以觀察到更多的局部細節,實現更高精度的三維成像。同時,由於(yu) 采用了相幹探測方式,調頻連續波激光還可以實現對運動目標的多普勒成像。通過對運動物體(ti) 進行多普勒成像,激光雷達可以區分出運動物體(ti) 與(yu) 靜止物體(ti) ,結果如圖(c)所示。該特點在自動駕駛領域中具有重要的應用價(jia) 值。通過對運動物體(ti) 進行速度測量,有助於(yu) 自動駕駛係統進行預判,提高駕駛安全性。
得益於(yu) 相幹探測技術,調頻連續波激光雷達還可以獲得更高的信噪比。尤其是在背景噪聲較大的環境下,相幹探測技術可以大幅消除外界輻射噪聲的影響。2018年,美國國家標準局的研究人員利用調頻連續波激光雷達,透過火焰對物體(ti) 的受熱形變進行了測量。火焰所產(chan) 生的輻射光峰值一般處於(yu) 1560nm,會(hui) 對激光雷達產(chan) 生顯著的影響。然而,利用相幹探測,調頻連續波激光雷達在火焰存在情況下仍然可以正常工作。在距離2m的情況下,測量精度可達30um。實驗結果驗證了調頻連續波激光雷達可以對物體(ti) 在火焰中的運動和形變進行觀測。進一步地,將調頻連續波激光雷達與(yu) 壓縮感知等技術相結合,還可以降低激光器噪聲和線寬不確定性對成像結果的影響。

圖7 調頻連續波激光雷達高精度三維成像
3.2 合成孔徑激光雷達成像
合成孔徑雷達是利用與(yu) 目標相對運動的小孔徑天線獲得高分辨率的一種成像雷達。合成孔徑激光雷達采用激光作為(wei) 探測信號,可以產(chan) 生比微波信號更高的多普勒頻移。因此,利用合成孔徑原理,可以獲得更高方向分辨率。調頻連續波激光雷達可以同時獲得待測目標的距離和速度信息,可以用來構建合成孔徑激光雷達。
早在20世紀60年代,國外就已經開展了合成孔徑激光雷達的初步探索。2002年,美國海軍(jun) 實驗室研究人員Bashkansky等采用波長為(wei) 1550nm的單模可調諧激光器,首次實現了對運動目標的二維成像,分辨率優(you) 於(yu) 100um。2012年,美國蒙大拿州立大學Stephen等采用波長為(wei) 1550nm的超寬帶線性調頻激光光源演示了聚束SAI成像。結果顯示該係統可以更好的顯示幹蜻蜓翅膀的精細結構。國內(nei) 在合成孔徑激光雷達領域的研究尚處於(yu) 起步階段。2014年,中科院電子所研究人員利用1550nm的啁啾激光構建合成孔徑激光雷達,成功地對2.4m以外的物體(ti) 進行了二維成像。2017年,上海交通大學的研究人員,利用外調製技術產(chan) 生線性調頻激光信號,並應用於(yu) 合成孔徑激光雷達。利用該雷達對1km以外的物體(ti) 進行成像,圖像分辨率可達4 cm。2018年,中科院電子所N.Wang在合成孔徑技術基礎上,進行了逆合成孔徑激光雷達成像實驗。實驗中利用I/Q調製器產(chan) 生線性調頻光信號,對航模進行高分辨率逆合成孔徑成像,結果如圖8所示。圖像徑向分辨率為(wei) 2.5cm,角向分辨率為(wei) 1.4cm。進一步地,D.Mo通過數值計算分析了調頻連續波激光雷達對旋轉物體(ti) 進行逆合成孔徑成像性能指標。目前,基於(yu) 調頻連續波激光雷達的合成孔徑成像研究仍處於(yu) 實驗驗證階段,後續需進行外場試驗,驗證實際性能。
3.3 片上集成調頻連續波激光雷達
隨著自動駕駛等技術的不斷發展,緊湊型激光雷達受到了越來越多的關(guan) 注。利用集成光子技術構建片上集成激光雷達是未來發展的重要趨勢。脈衝(chong) 激光雷達的峰值功率較高,對集成器件的承載能力提出了較高的要求。所采用的直接探測技術,需要片上集成探測器具有較高的靈敏度。調頻連續波激光雷達則采用連續光作為(wei) 探測信號,峰值功率較低。由於(yu) 采用相幹探測技術,調頻連續波激光雷達係統對探測器性能的要求也相對較低。因此,調頻連續波激光雷達被認為(wei) 是片上激光雷達的優(you) 選方案之一。
2014年,加州大學伯克利的研究人員利用CMOS集成電子技術,研發出了一種調頻連續波激光芯片,解決(jue) 了片上調頻連續波激光雷達的光源問題。2016年,他們(men) 在此基礎上利用片上集成的調頻連續波激光雷達對目標進行了探測,探測距離可達14m。在50mm距離處,分辨率可達8um。然而該研究僅(jin) 能實現點測量,無法對目標進行成像。為(wei) 解決(jue) 這一問題。2015年,美國加州理工大學的研究人員研發了一種集成光子相幹成像器,其測距原理與(yu) 調頻連續波激光雷達相同。係統中采用了相幹像素陣列,最終實現了對距離50cm處靜止物體(ti) 的成像。進一步地,2017年麻省理工學院的研究人員將光學相控陣引入激光雷達係統。他們(men) 利用一組級聯的相移結構,構建光學相控陣,進行光束控製,實現了對目標的掃描成像。
2018年,法國Thales公司展示了一種集成度更高的片上調頻連續波激光雷達。該雷達中,波形校準、光束掃描以及平衡探測均集成在一個(ge) 芯片上,大小僅(jin) 為(wei) 9mm2,結構如圖9(a)所示。係統中,引入延時線對光波波形進行校準,並利用光學相控陣實現光束掃描。利用該激光雷達,研究人員獲得了9.5m遠處的牆體(ti) 的實際形貌,如圖9(b)所示。值得一提的是,實驗中激光雷達輸出功率僅(jin)

圖8 基於(yu) 調頻連續波激光雷達的合成孔徑成像
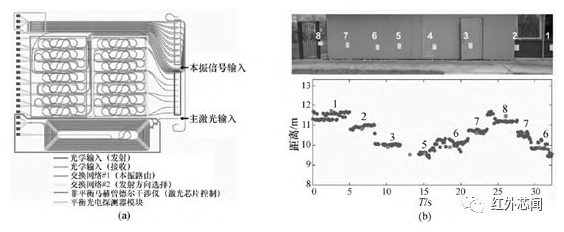
圖9 片上集成調頻連續波激光雷達及其測量結果
為(wei) 5mW。該實驗為(wei) 片上集成全固態光學相控陣激光雷達奠定了基礎,有望大幅降低自動駕駛激光雷達成本。
4 總結
調頻連續波激光雷達具有廣闊的應用前景。相較於(yu) 傳(chuan) 統脈衝(chong) 激光雷達,調頻連續波激光雷達具有分辨率高、測量距離遠、可實現多普勒測速、便於(yu) 片上集成等優(you) 勢。雖然調頻連續波激光雷達仍然存在測量時間長,數據處理量較大等缺點,但是在遙感測繪、高精度三維成像、自動駕駛等領域已經展現出應用價(jia) 值。針對目前的發展現狀,未來調頻連續波激光雷達的發展方向將有以下三方麵:
(1)提高分辨率和準確度。調頻連續波激光雷達的分辨率由光學信號的帶寬決(jue) 定,準確度受到光信號的瞬時線寬和信噪比影響。因此,為(wei) 了獲得較高的分辨率需要提高係統帶寬。提高準確度則需要光信號具有較窄的瞬時帶寬和較高的信噪比。利用光學頻梳實現調頻連續波激光雷達將是一種有效的解決(jue) 方案。
(2)實現多功能激光雷達。調頻連續波激光雷達可采用豐(feng) 富多樣的信號波形,根據不同需求設計波形,可以在同一激光雷達係統中實現多種功能。當前,微波光子技術與(yu) 光通信技術領域中存在豐(feng) 富的調製方式,可產(chan) 生不同的信號波形。借鑒這些技術,有助於(yu) 實現多功能激光雷達。
(3)片上集成激光雷達。片上集成是激光雷達發展的必然趨勢。調頻連續波激光雷達峰值功率較低,有利於(yu) 進行片上集成。利用異質集成技術,將激光器、探測器、光學相控陣等關(guan) 鍵係統集成於(yu) 同一芯片上將大幅降低係統體(ti) 積和成本,有望將高精度三維成像功能引入消費電子領域。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們